Optimizing Torque Control of Siemens Servo Drives Through TIA Portal

Introduction
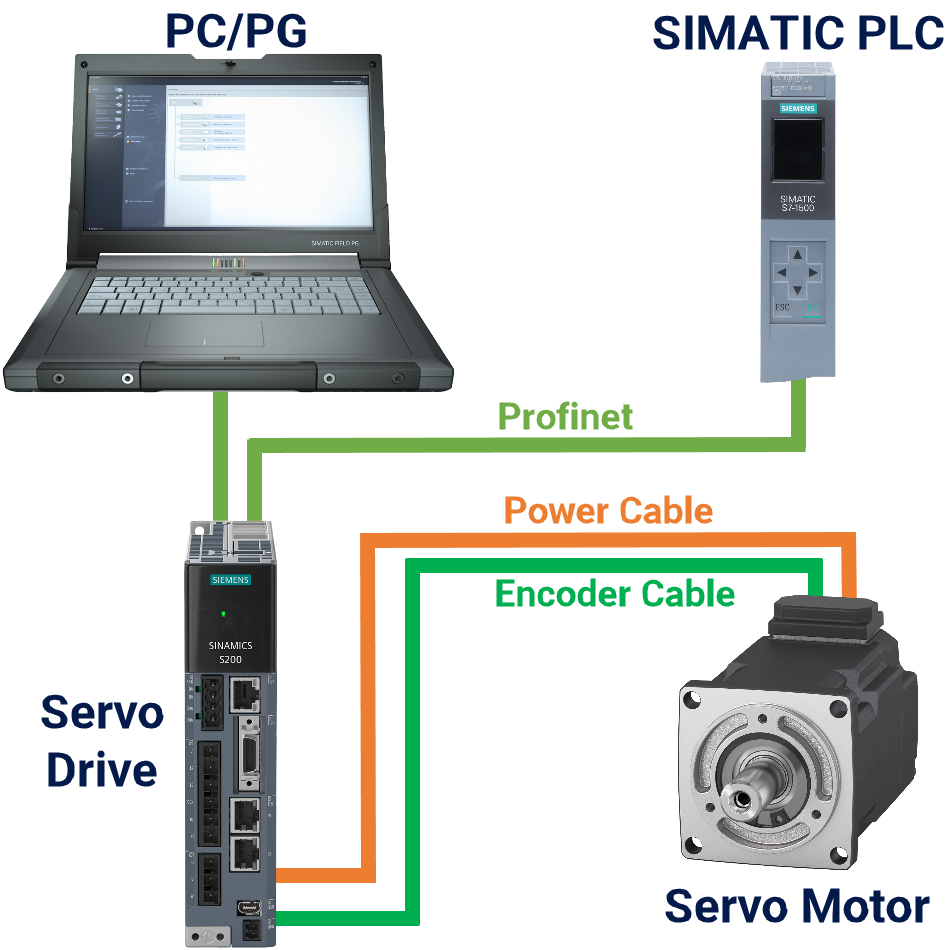
One of the cool features of the SINAMICS S200 PN servo drive system is called Telegram 750, which lets you fine-tune the torque settings like the extra torque, maximum and minimum limits, and the actual torque. This tutorial walks you through applying torque using SIMATIC S7-1500 PLC. Moreover, you can extend the content of this tutorial to torque applications with SIMATIC S7-1200 PLC as well. For a quick and clear understanding of the automation task, refer to Figure 1.1.
Prerequisites
What you will need to follow along with this tutorial:
- You need to install the TIA Portal software on your personal computer. Although this tutorial refers to version 18, rest assured that other versions of the TIA Portal will work just fine.
- You need to be familiar with installing the GSDML file of your desired servo drive in the TIA Portal.
- You should know about adding the PLC and servo drive hardware to the project.
- You are required to be acquainted with the integration of libraries into the TIA Portal project.
Fundamental Insights on Telegram 750
Table 2.1 presents all the details on supplementary Telegram 750. For this Telegram, the controller establishes communication by transmitting three words to the drive, and the servo drive sends back one word to the controller.
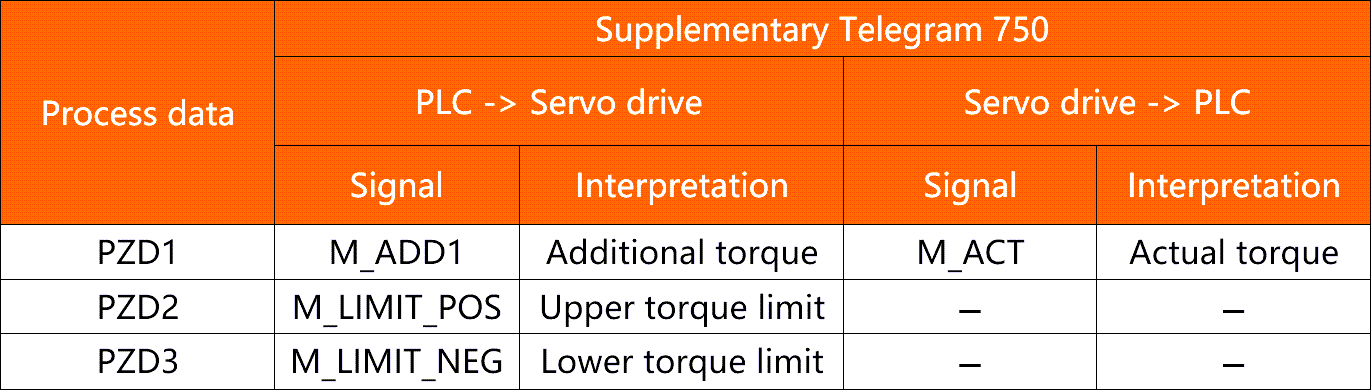
If you make any of the following settings while using Telegram 750, you better hold on tight because the motor unleashes its inner speed demon and accelerates like there is no stopping it:
- Adjusting the upper torque limit to a negative value using the M_LIMIT_POS
- Changing the lower torque limit to a positive value using the M_LIMIT_NEG
Applying Torque Using a Function Block
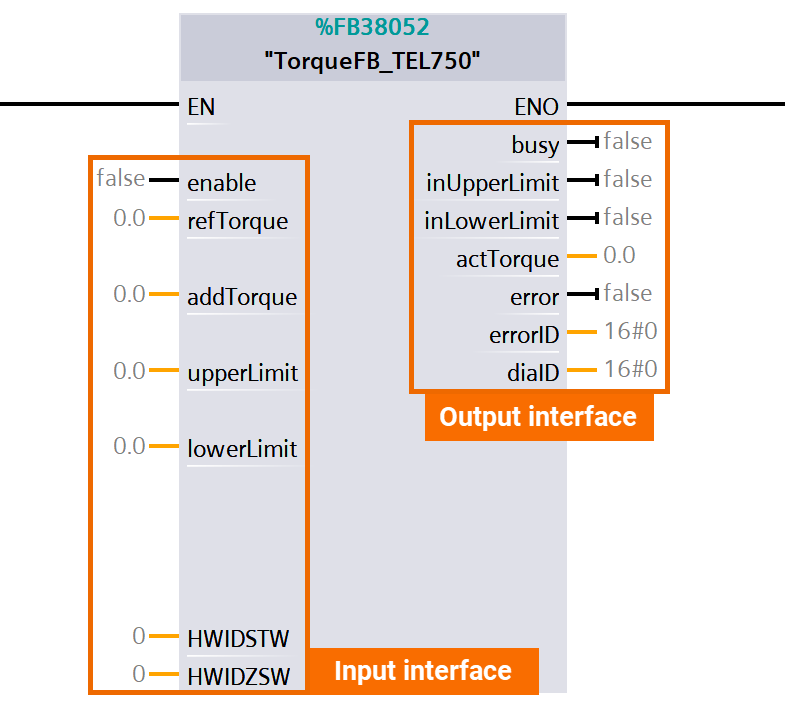
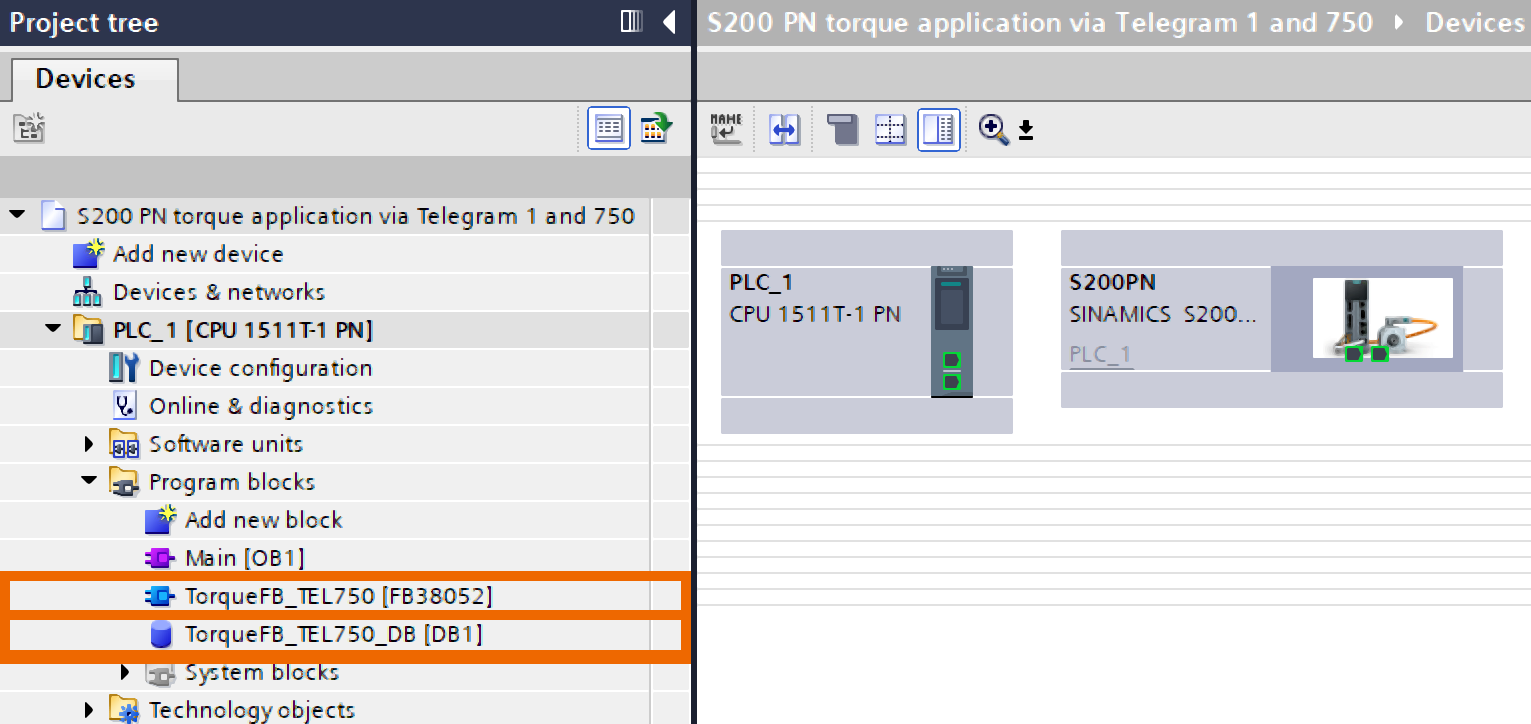
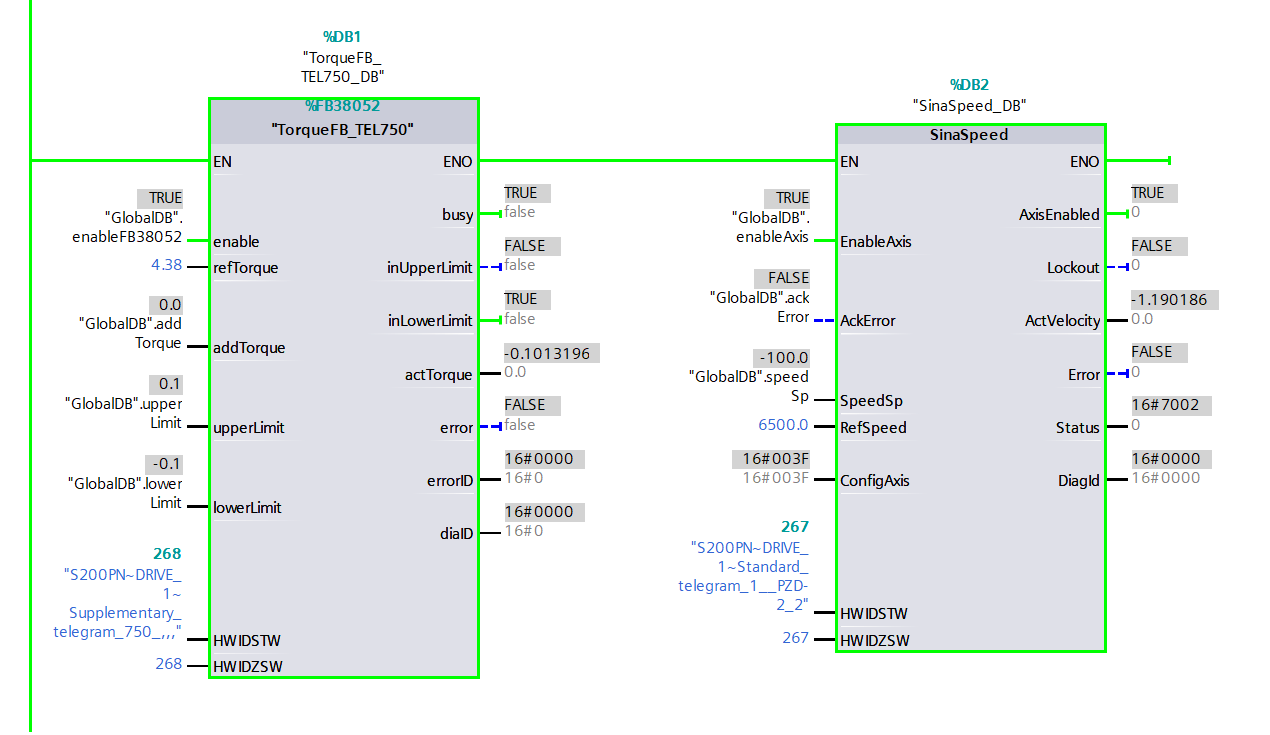
Check out Figure 3.1 for an in-depth view of the function block, specially crafted to utilize with SIMATIC S7-1500 and S7-1200 PLCs. Integrating FB38052 means you don't have to worry about creating the corresponding instance DB—it happens automatically. With this function block, you can cyclically take charge of a SINAMICS drive using the supplementary Telegram 750. The block's input interface includes seven inputs in various data formats. These inputs are preconfigured with initial values during the function block's initial configuration. Also, the block's output interface comes with seven outputs in various data formats.
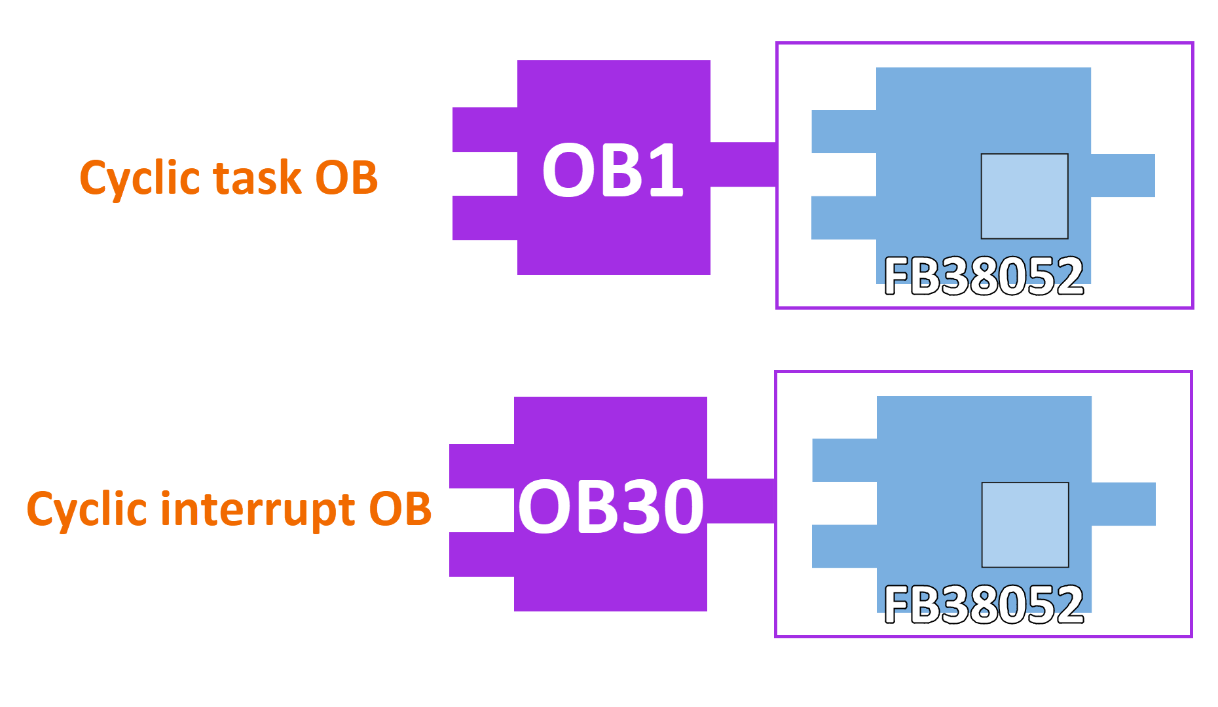
Here are the OBs where you can install the function block. OB1 is perfect for cyclic tasks or OB30 (or similar OBs) if you require cyclic interrupt tasks.
It is time to become pros at configuring and running the torque application with the help of Telegram 750 and Telegram 1. Start with a TIA portal project creation, then add the desired CPU and integrate the target servo drive (SINAMICS S200 PN) to the project using the GSDML file.
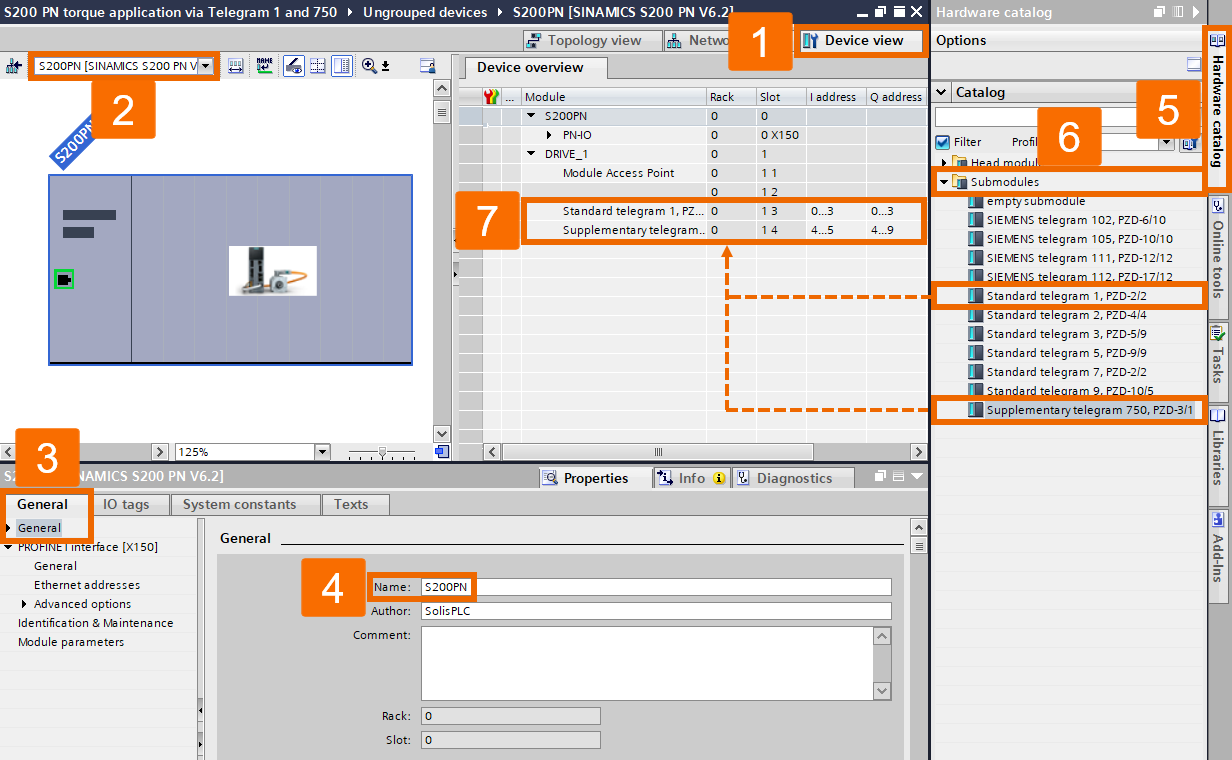
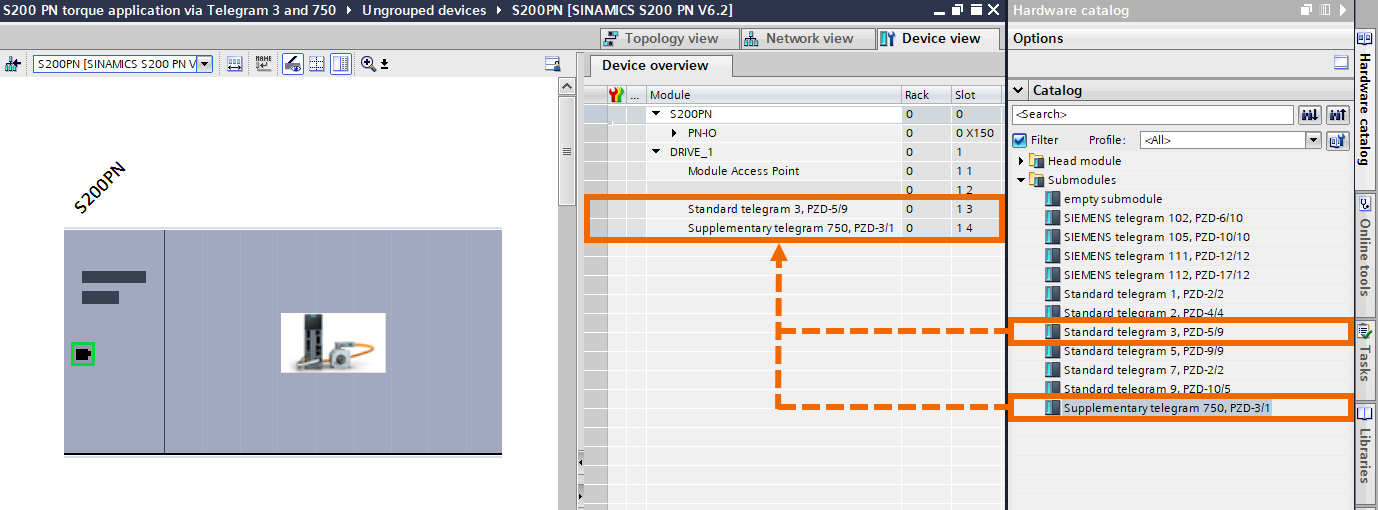
Then, transition to the Device View. Pinpoint the relevant SINAMICS S200 servo drive by selecting it from the options in the drop-down menu. Give the device a new name within the drive properties' general menu. Choose the Hardware Catalog tab. Expand the folder containing the submodules. Fit in the supplementary Telegram 750 alongside the standard Telegram 1 into your servo drive.
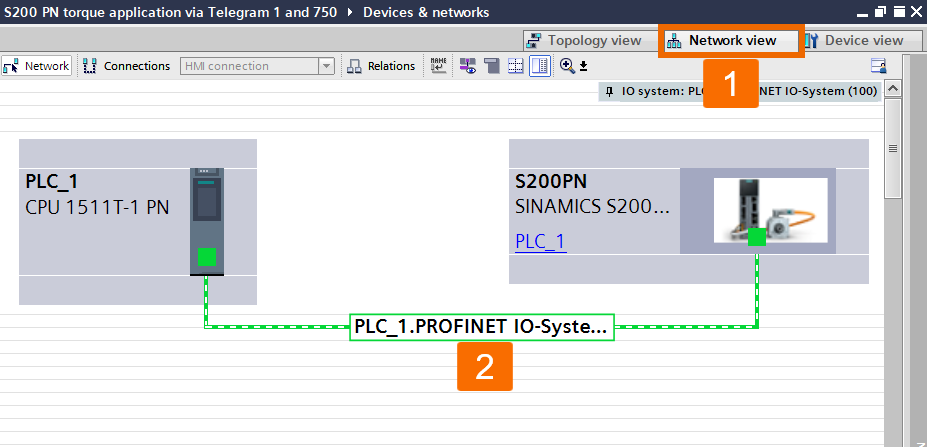
Hop over to the Network View and set up a Profinet connection between the PLC and the S200 servo drive.
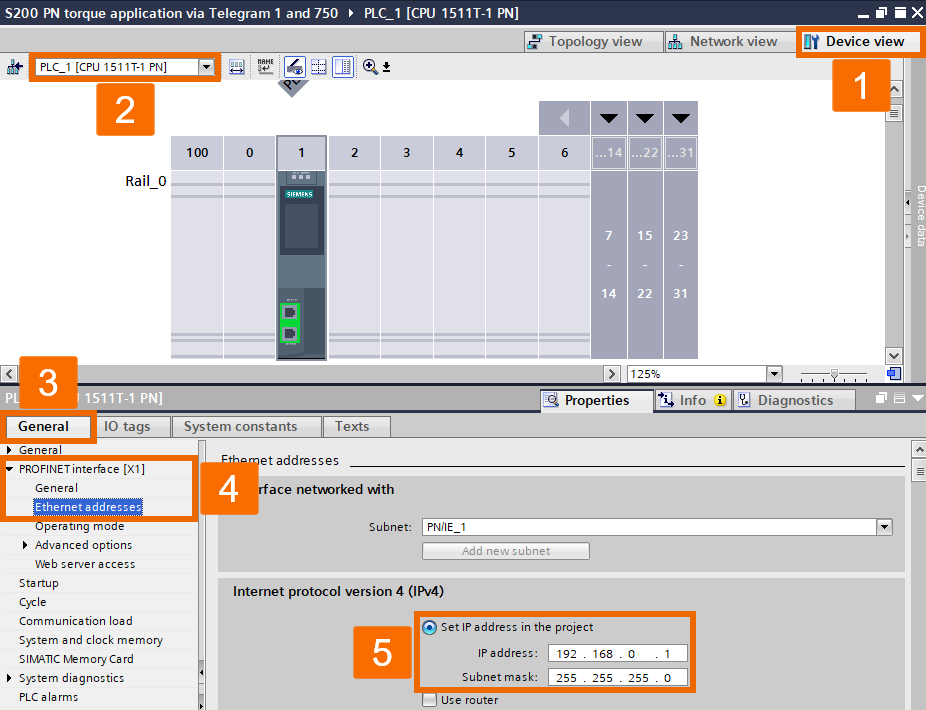
The CPU's IP address is 192.168.0.1.
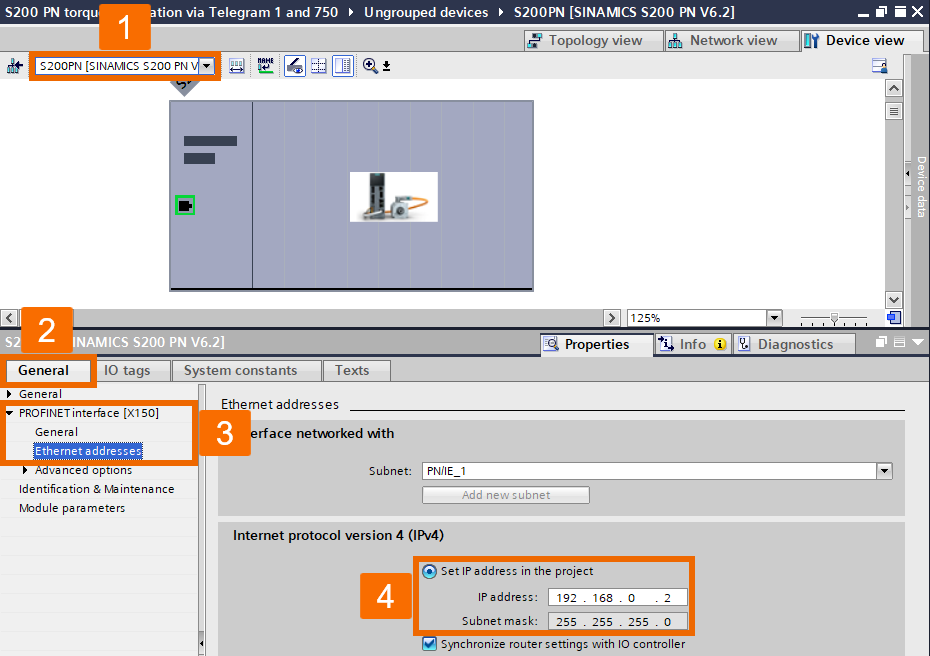
The S200 servo drive's IP address is 192.168.0.2. The Profinet connection is configured with a subnet mask of 255.255.255.0.
Contact the Siemens support in your area and request to download the TorqueFB_TEL750 library, and after that, include it in your project.
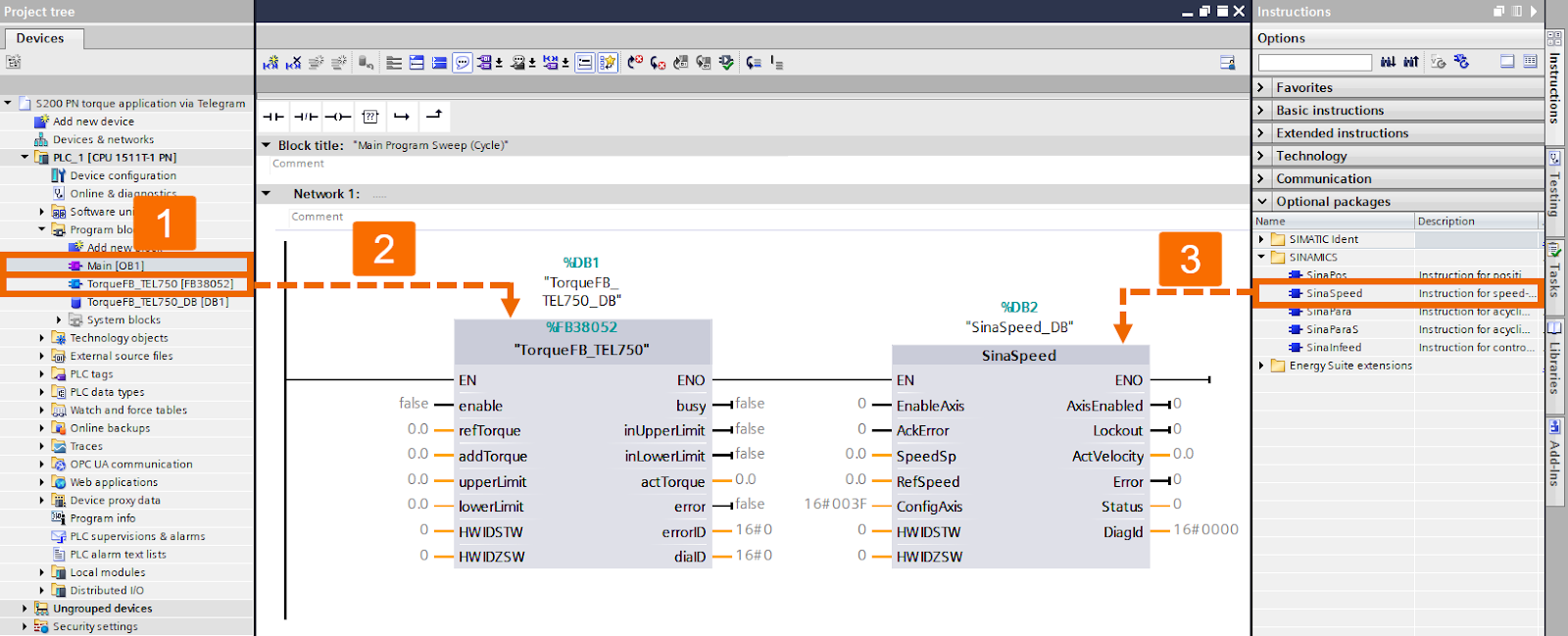
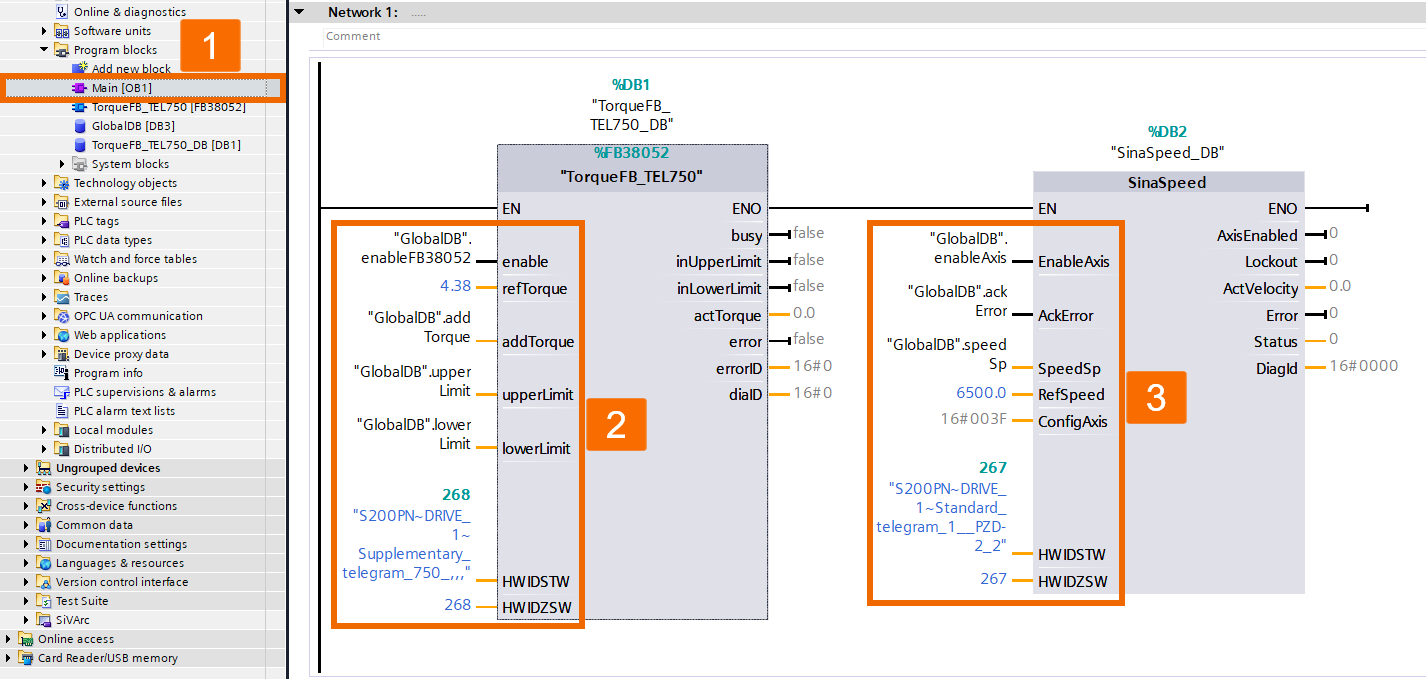
Access the Main [OB1] programming block and place SinaSpeed and FB38052 within Network 1.
Follow the lead from Figure 3.9 and Figure 3.10 and generate a global data block with the related variables.
Tweak the PLC logic using those global variables you came up with.
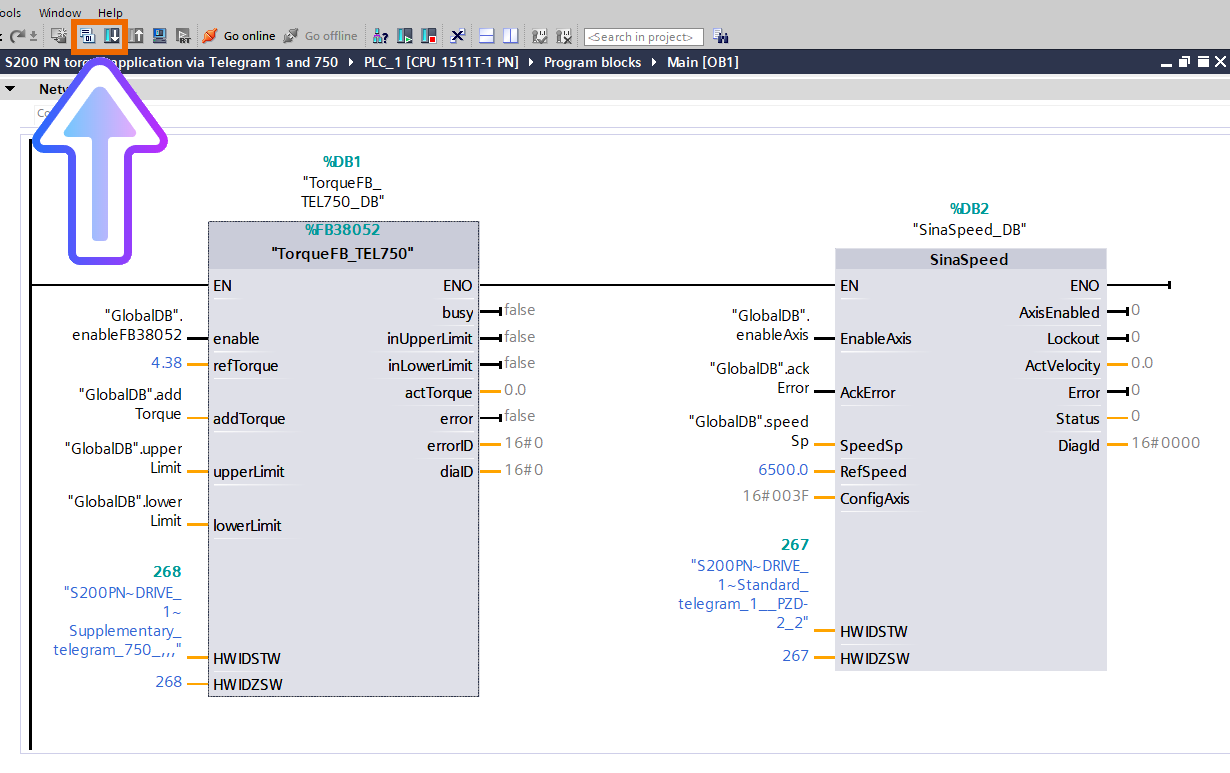
Make the project ready for compilation and then download it to the PLC.
Give the motor a spin and see if the load torque hits around 0.02Nm. Afterward, make sure the torque limit is set above the load torque.
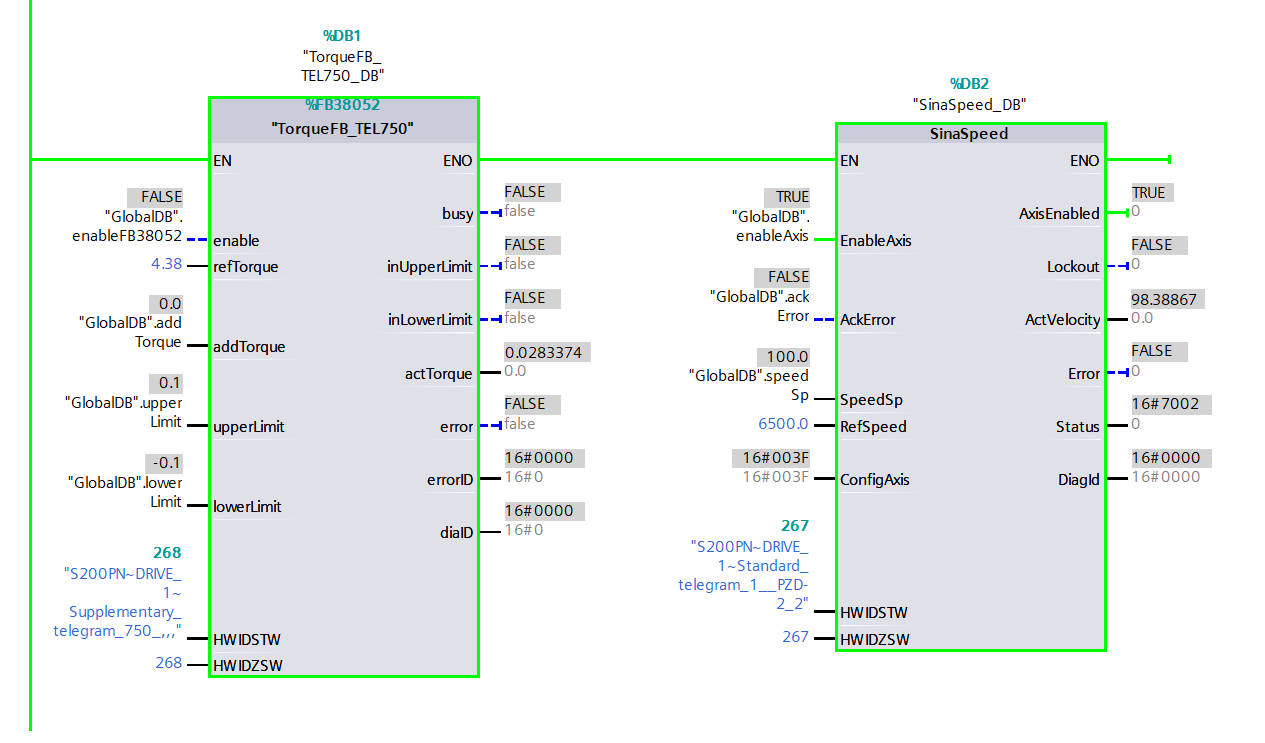
Activate the function block. Lock the motor in place, resulting in a velocity of 0, and cap the actual torque at the highest limit.
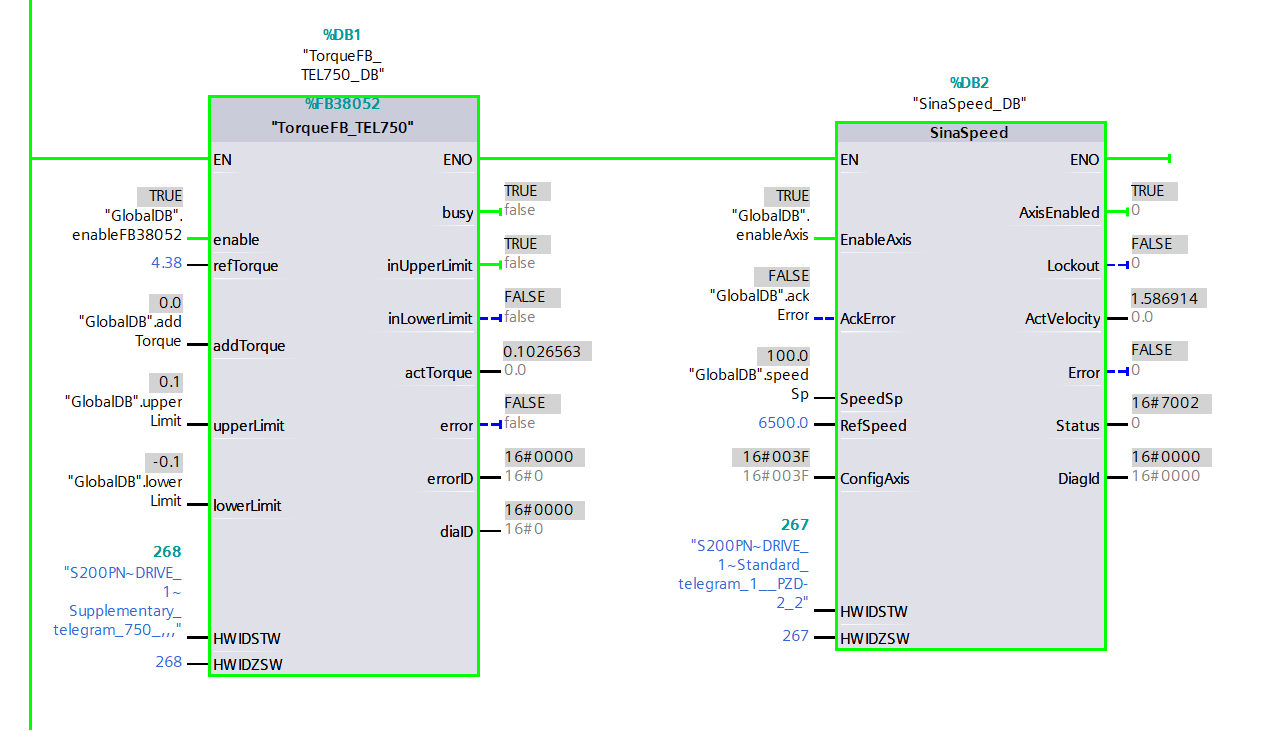
Alter the rotation direction, and then lock the motor. As a result, the velocity hits 0, and the torque is restricted to the minimum limit.
Applying Torque Using the Technology Object in Real-Time
This section centers around the technology object that includes the speed axis, and its depiction is specifically outlined through Telegram 3 and the GSDML file. This part does not introduce any other telegram or technology object, including those in StartDrive. However, they can be referenced in this application. Now is the moment to uncover the specifics of configuring and operating the torque application using the supplementary Telegram 750 and the standard Telegram 3 via RT (real-time) communication.
Within this technique, after expanding the submodules folder, slap in the supplementary Telegram 750 and the standard Telegram 3 into your servo drive.
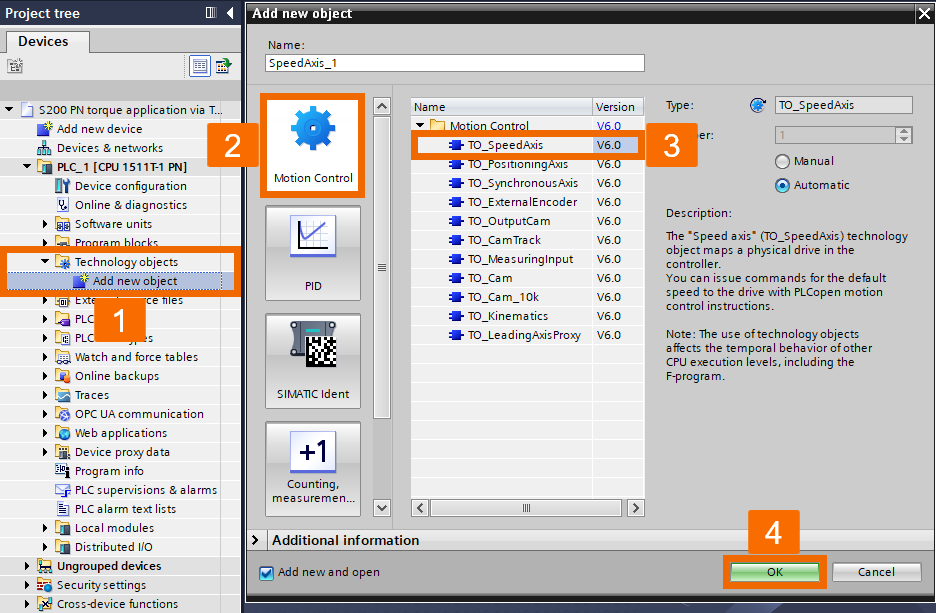
Once you establish the Profinet connection between the PLC and the servo drive, it is required to include the target technology object in the project. To do so, check out the project tree, expand the Technology objects folder, and double-click over the Add new object to open it up. Under Motion control, you want to select the TO_SpeedAxis, hit OK, and watch this speed axis tech object become part of your project.
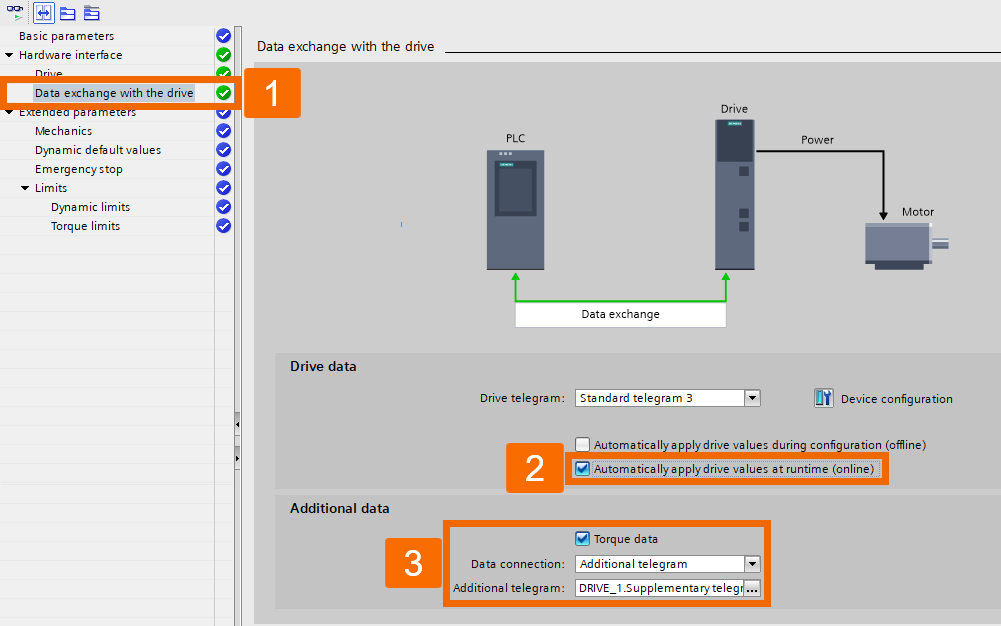
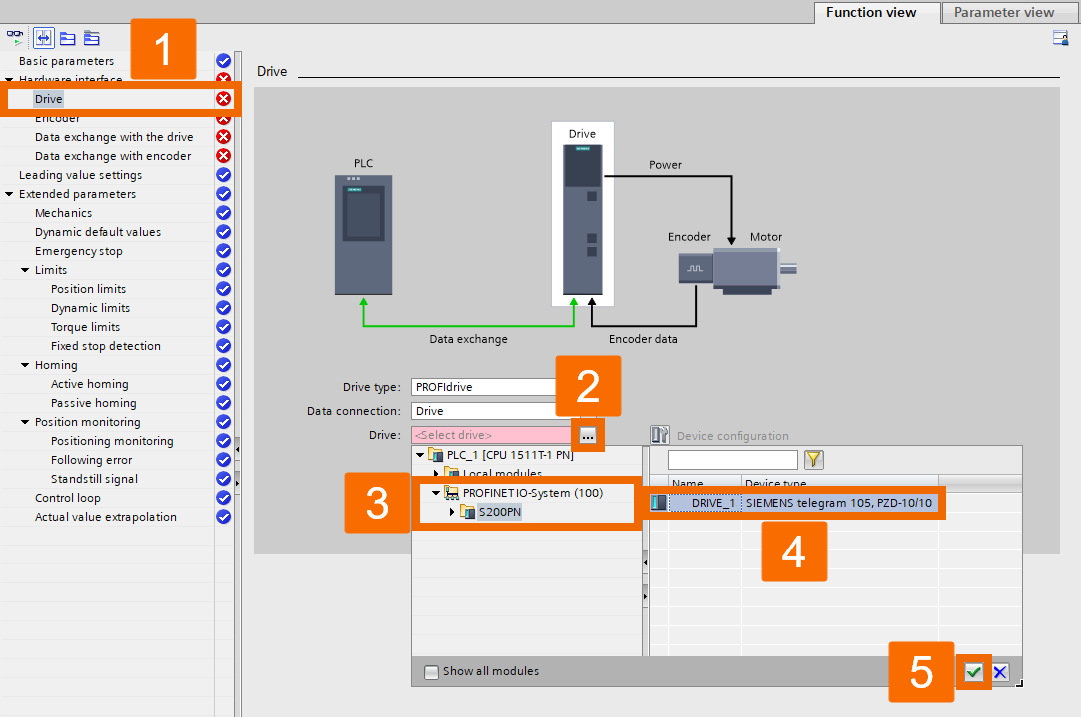
Within the Function view, select the Drive menu. Pop open that screen by hitting the button. Pick the telegram you are aiming for. Hit OK to toss this data into the properties of the drive.
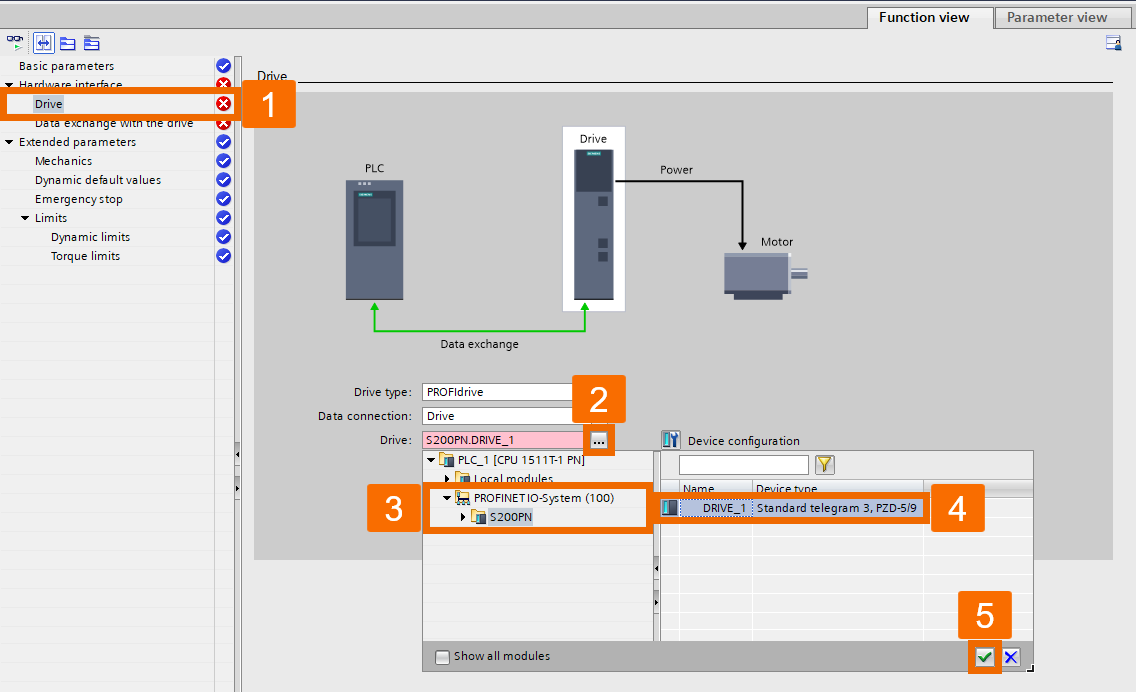
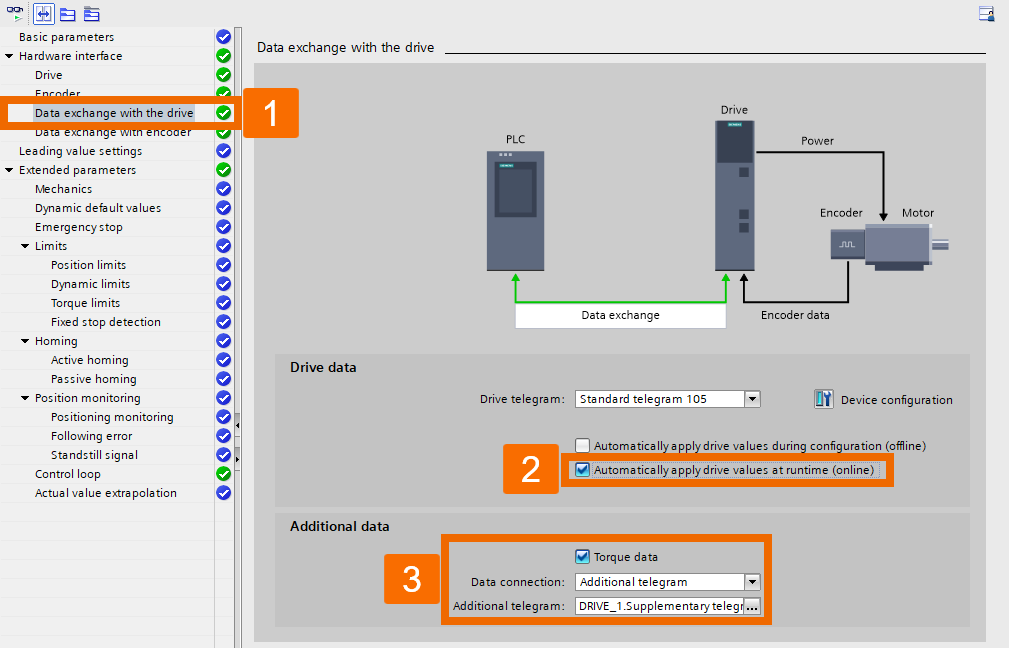
Check the checkbox for the feature that applies drive values automatically while the system is running (online). Once you've appropriately configured Telegram 750, the torque data kicks in automatically, and by default, the Data connection and additional Telegram properties are set up automatically.
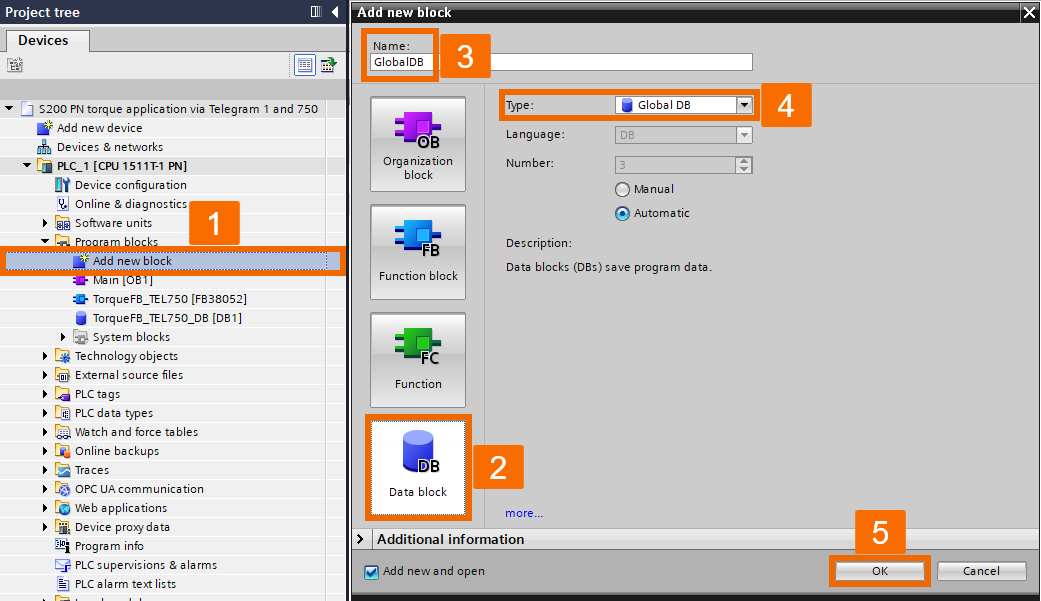
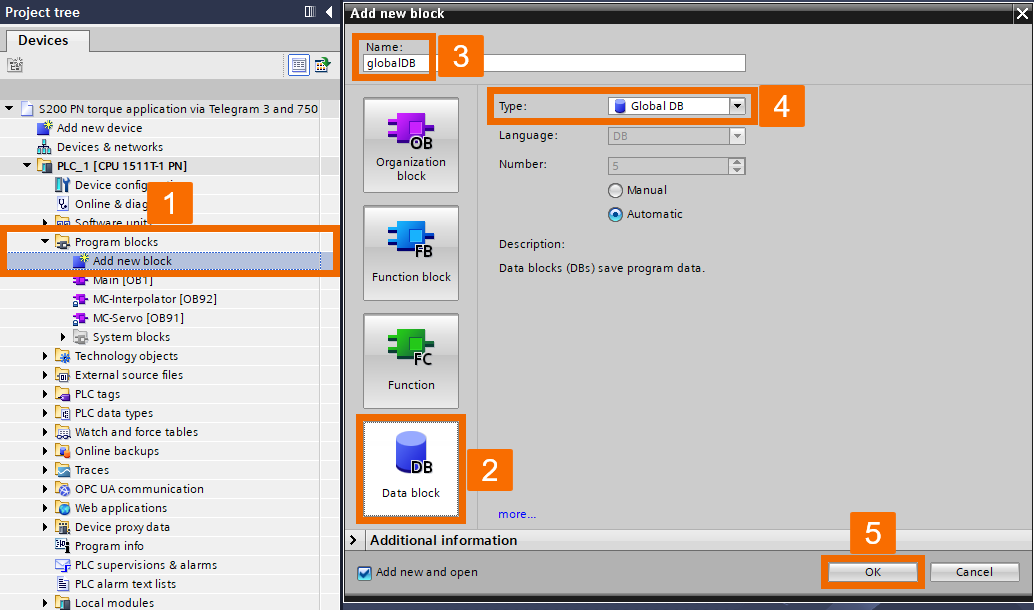
Under the PLC_1 item in the project tree, expand the Program blocks folder and double-click over the Add new block to generate a global data block called globalDB.
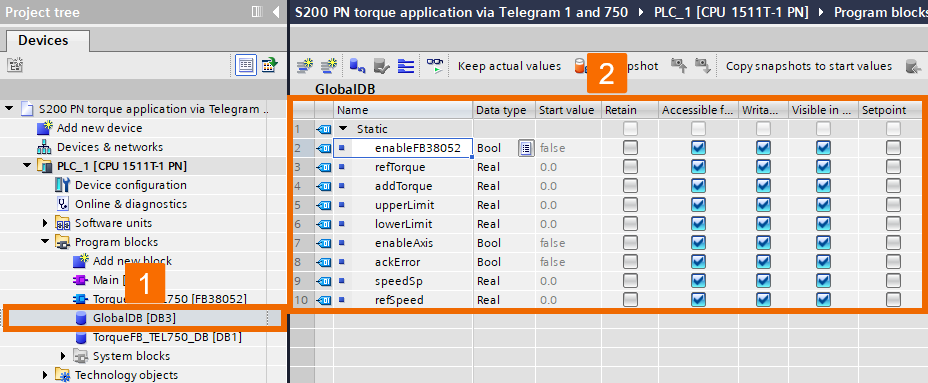
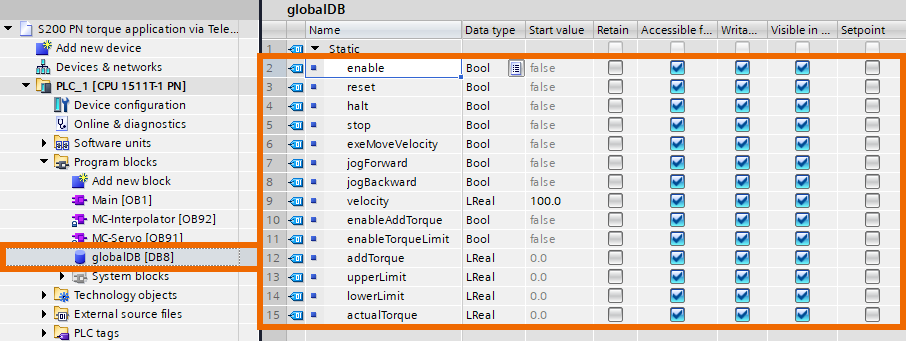
When the global data block window opens, tweak the corresponding table with related variables, as shown in Figure 4.6.
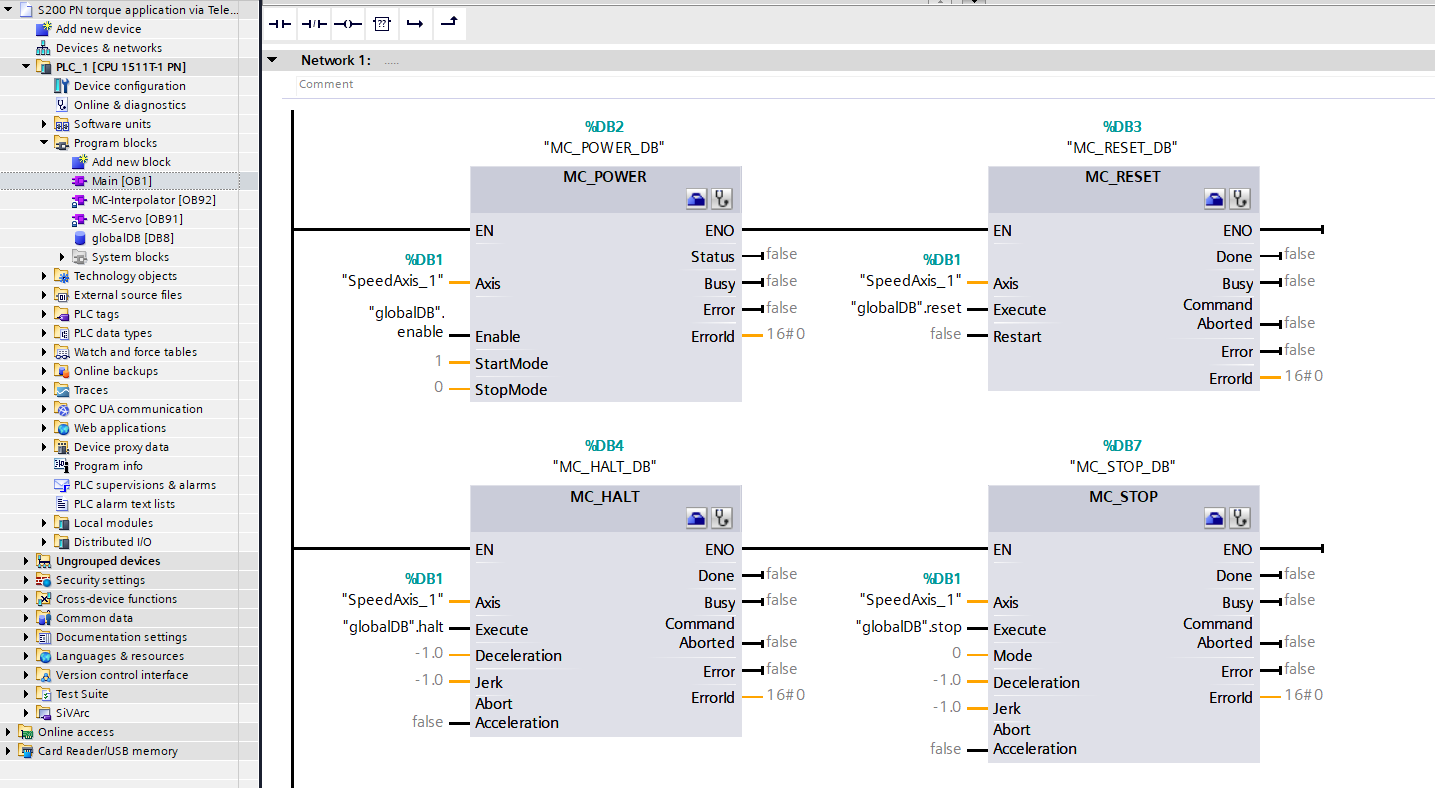
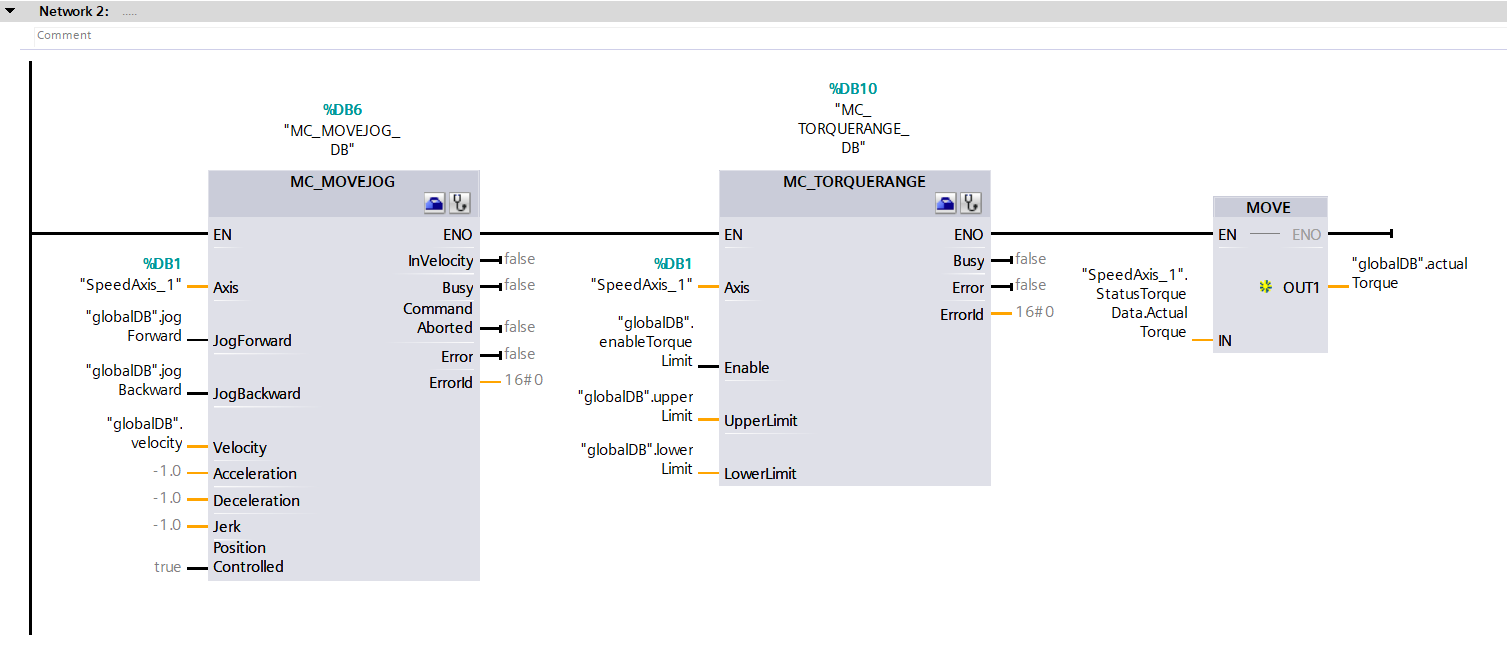
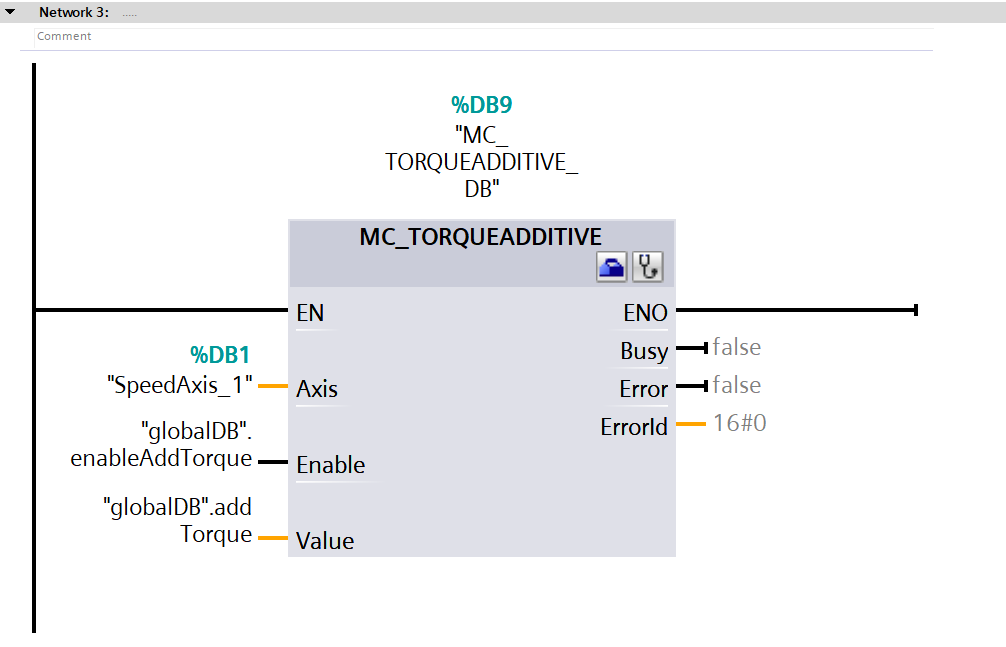
Open up the main organization block (Main [OB1]) and create some logic in network 1, network 2, and network 3, as depicted in Figures 4.7, 4.8, and 4.9. Ensure that you compile the project and then initiate the download to the PLC.
Give the motor a spin and ensure the load torque is at 0.02Nm. Afterward, adjust the torque limit to a value higher than the load torque and activate the block that limits torque.
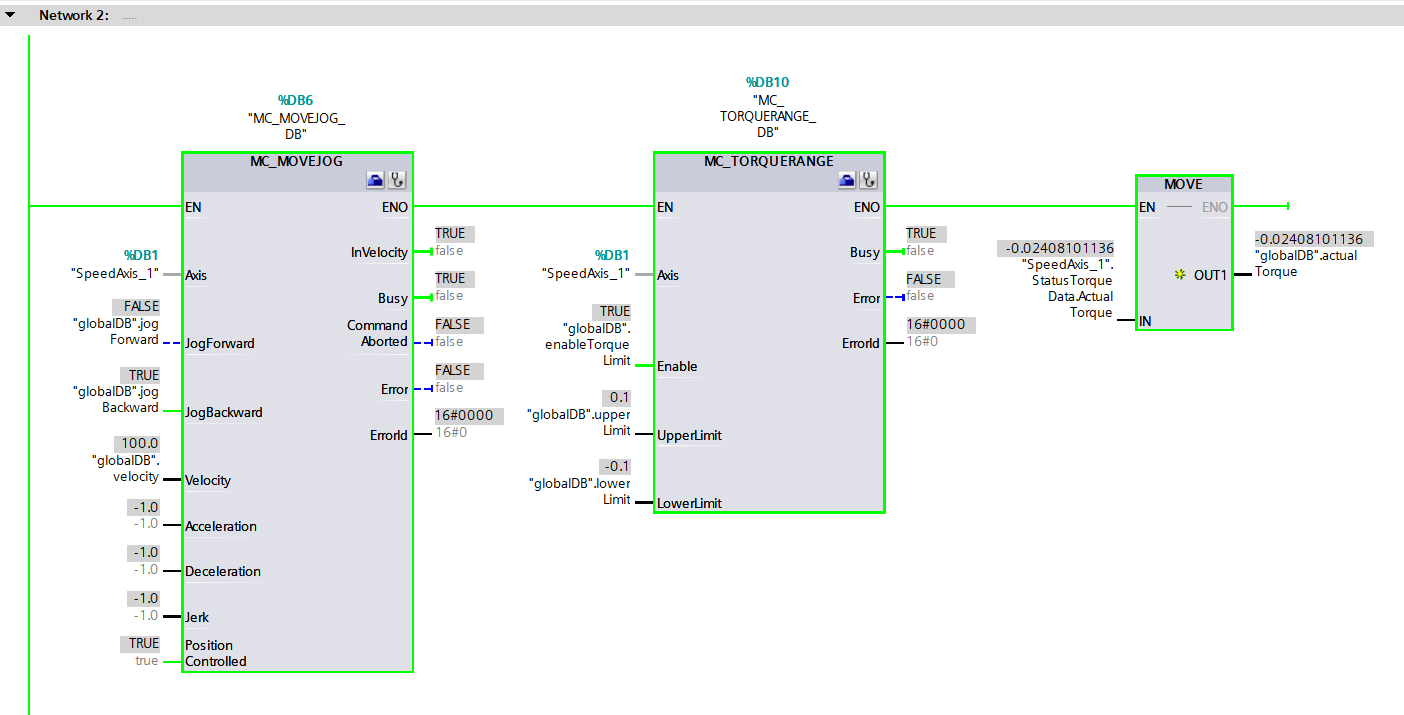
Halt the motor (prevent the motor from moving), restricting the actual torque to the lower limit value.
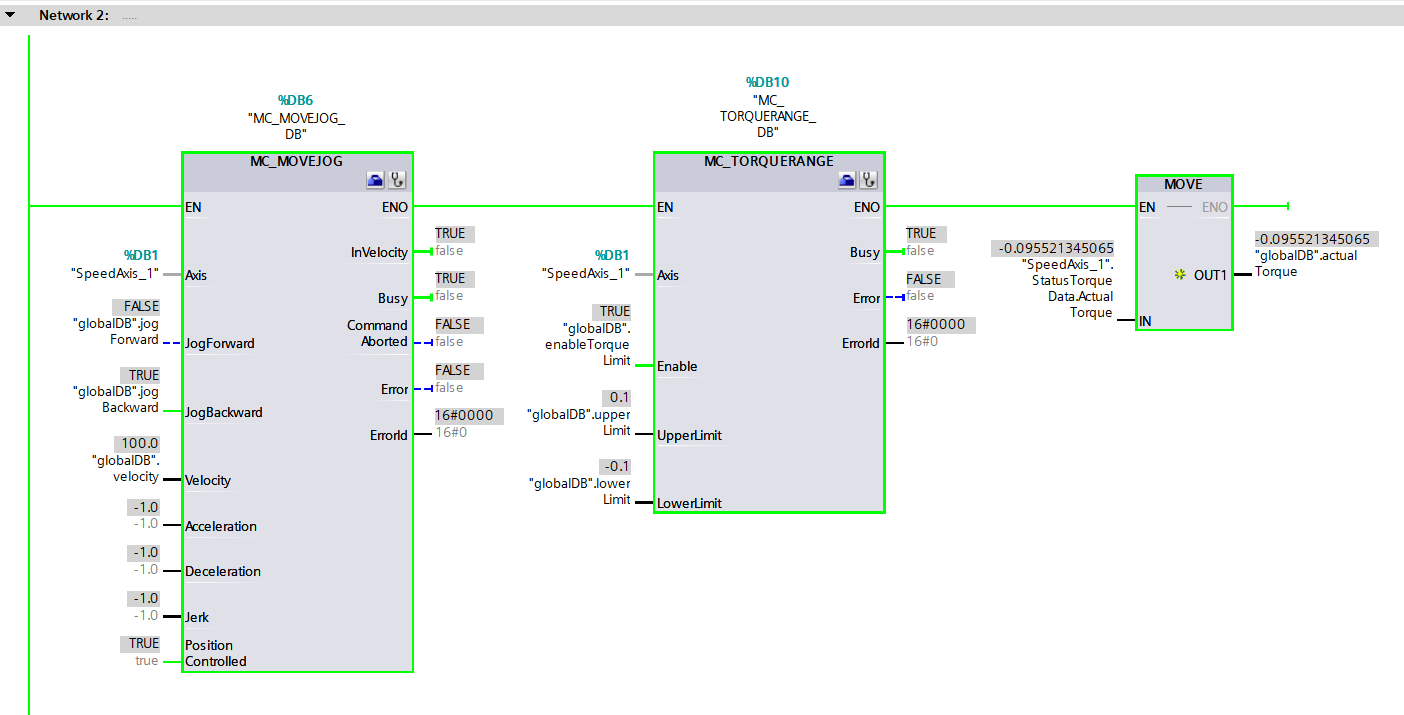
Switch the direction of rotation and once more halt the motor; the actual torque is restricted to the uppermost value.
Applying Torque Using the Technology Object in Isochronous Real-Time
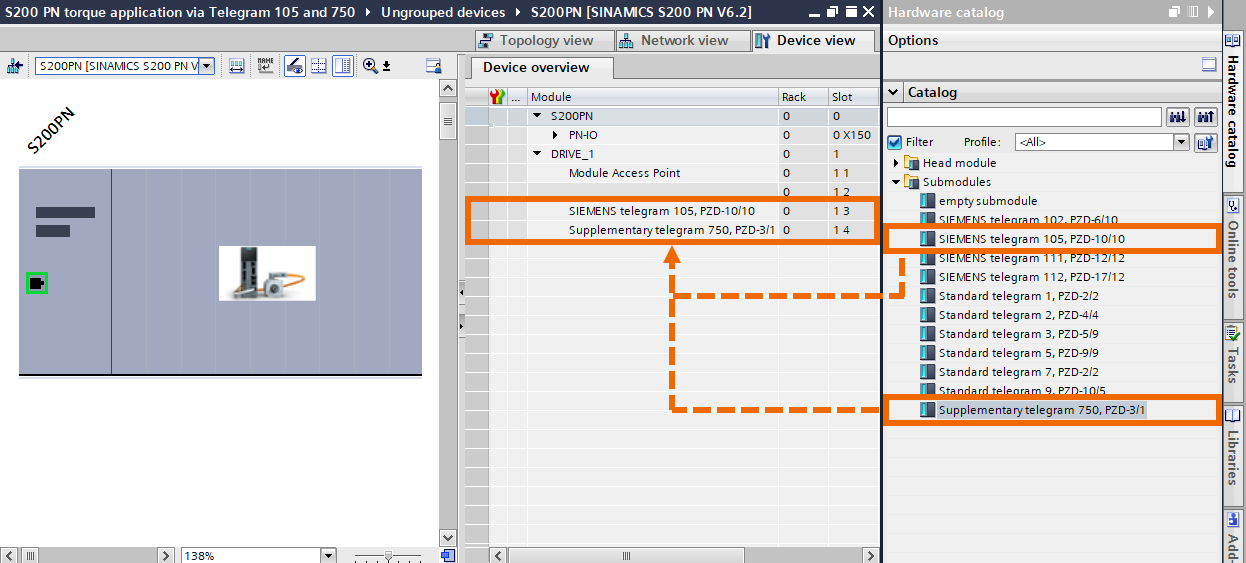
This section centers around the technology object that includes the position axis, and its depiction is specifically outlined through Telegram 105 and the GSDML file. Now is the moment to uncover the specifics of configuring and operating the torque application using the supplementary Telegram 750 and the standard Telegram 105 via IRT (isochronous real-time) communication. Within this technique, after expanding the submodules folder, slap in the supplementary Telegram 750 and the standard Telegram 105 into your servo drive.
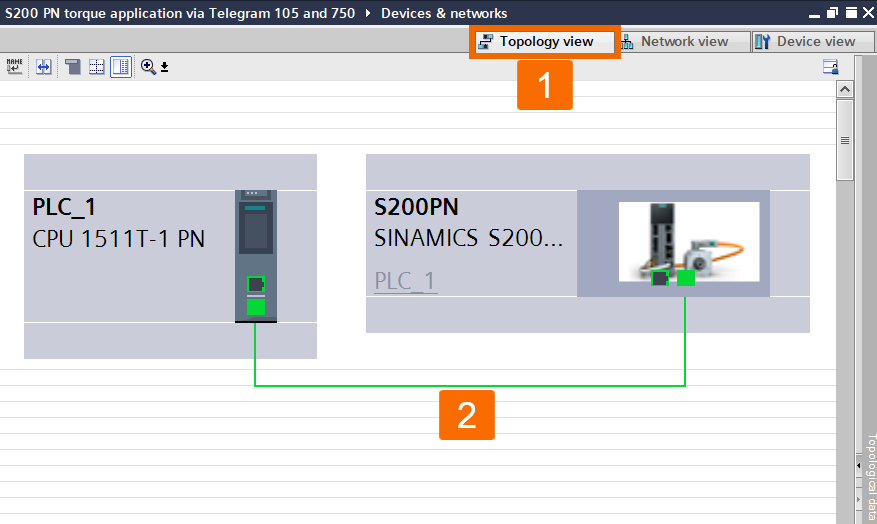
Shift to the Topology view and customize the topology using the actual connection.
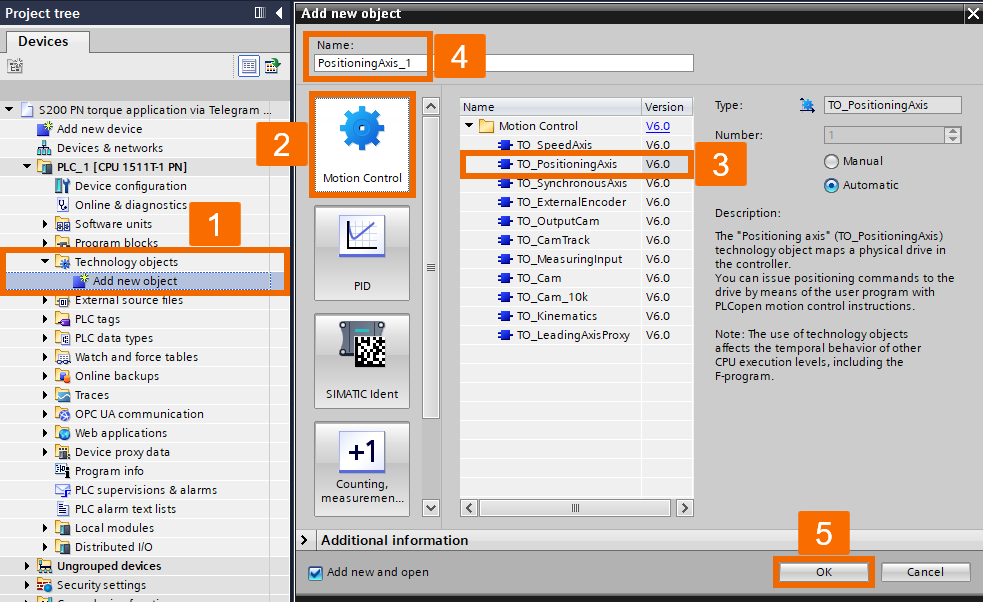
Expand the Technology objects folder within the project tree on the left pane, and double-click over the Add new object to open it up. Under Motion control, you want to select the TO_PositioningAxis, hit OK, and watch this position axis tech object become part of your project.
Arrange the Drive menu to incorporate Siemens Telegram 105.
When configuring the setting of the Data exchange with the drive function, enable the feature that applies drive values automatically while the system is running (online) to retrieve the drive data automatically. When Telegram 750 is appropriately configured in the servo drive, the additional data will be automatically updated with the torque details.
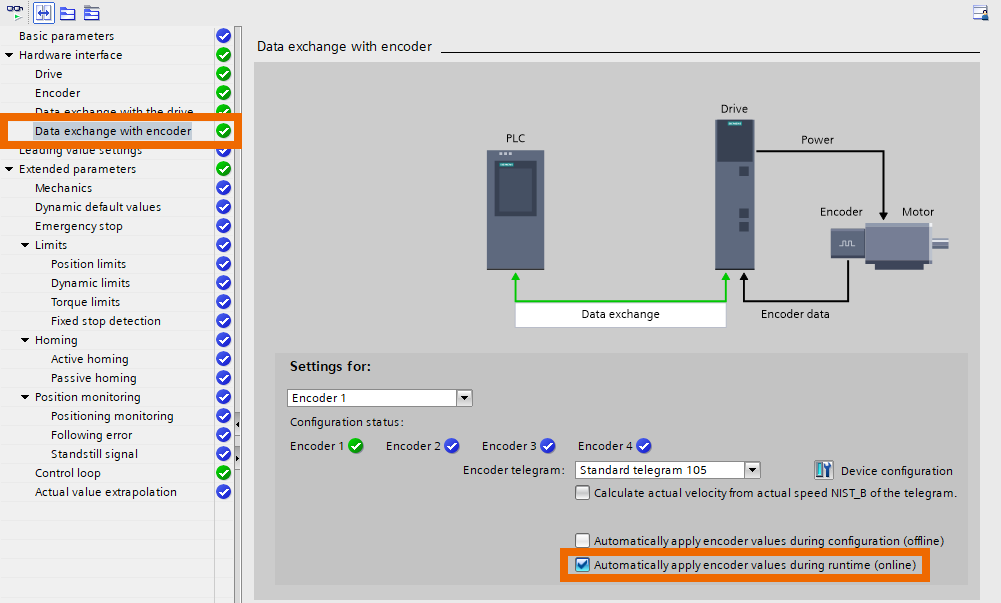
Within the Data exchange with encoder menu, check the checkbox for the option that automatically applies encoder values while it's running (online).
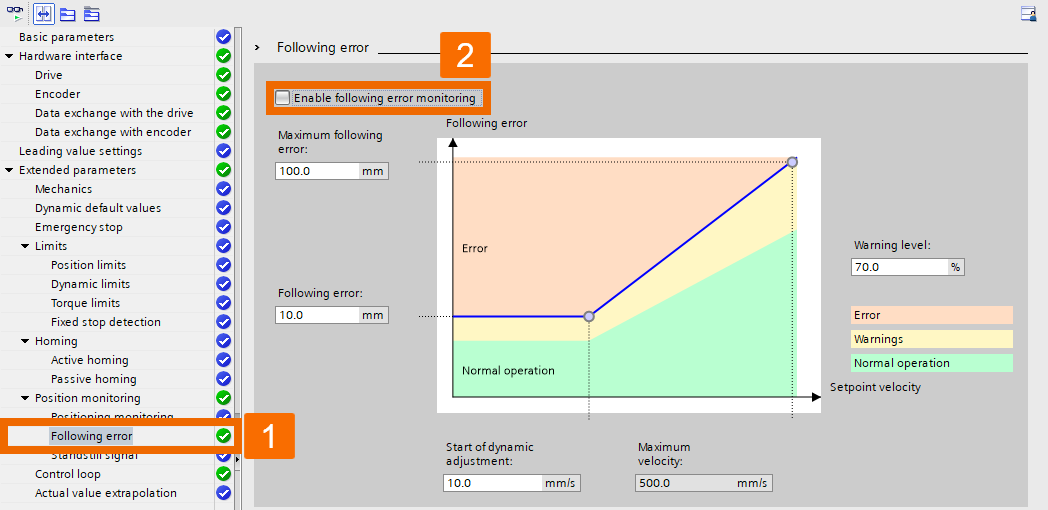
Toggle off the error monitoring function so you don't have to deal with the annoying error alarm while using torque limit functions for positioning. Alternatively, set up an appropriate value for testing the torque limit functions.
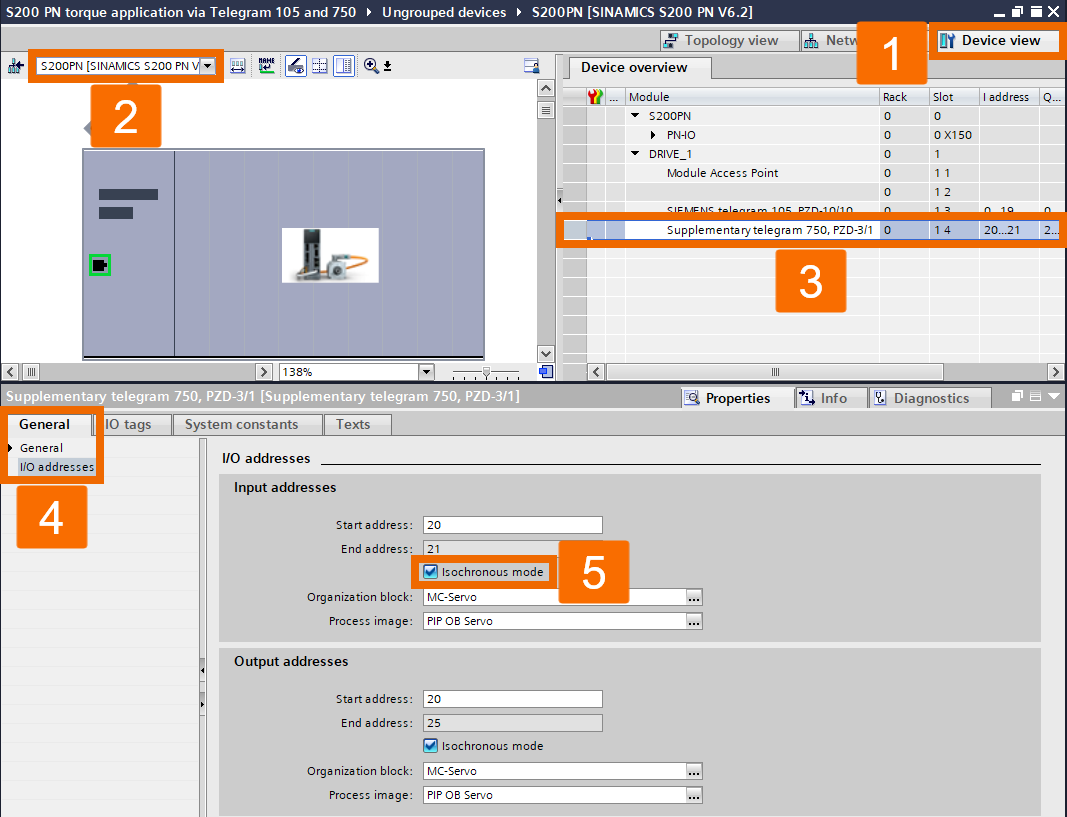
Switch to the Device view. Make a selection of the S200 servo drive. Pick out the supplementary Telegram 750. Then, navigate to the Properties in the inspector window to enable the isochronous mode.
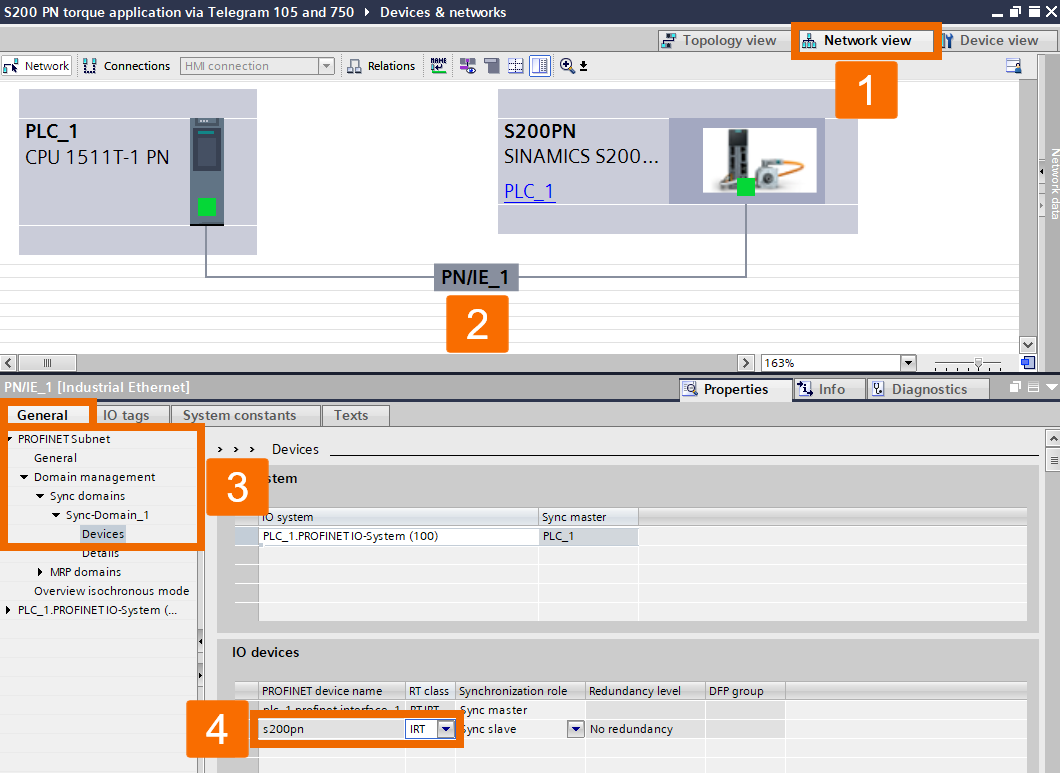
Hop to the Network view and single out PN/IE_1. Under the General tab, navigate Domain management -> Sync domains -> Sync-Domain_1 to reach the Devices item. From there, tweak the properties to switch the RT class to IRT communication.
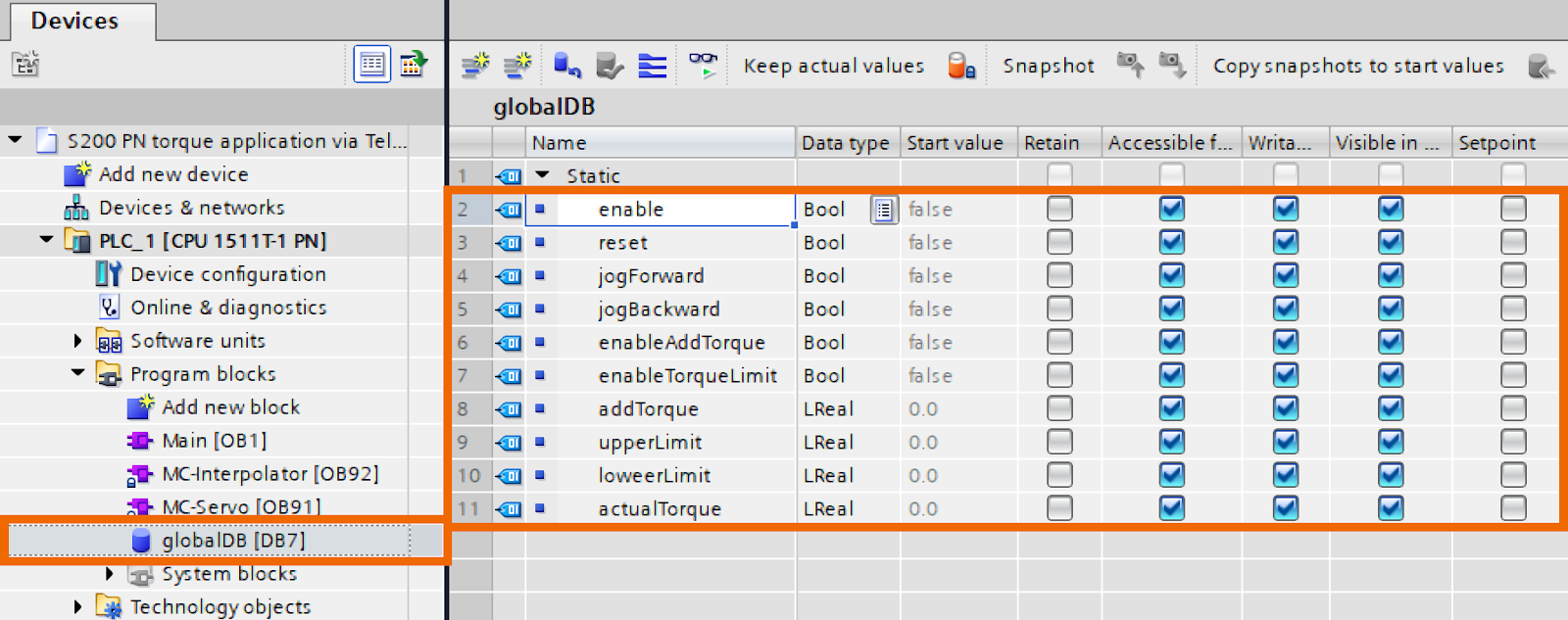
Under the Program blocks folder, generate a global data block and tweak the corresponding table with related variables, as shown in Figure 5.10.
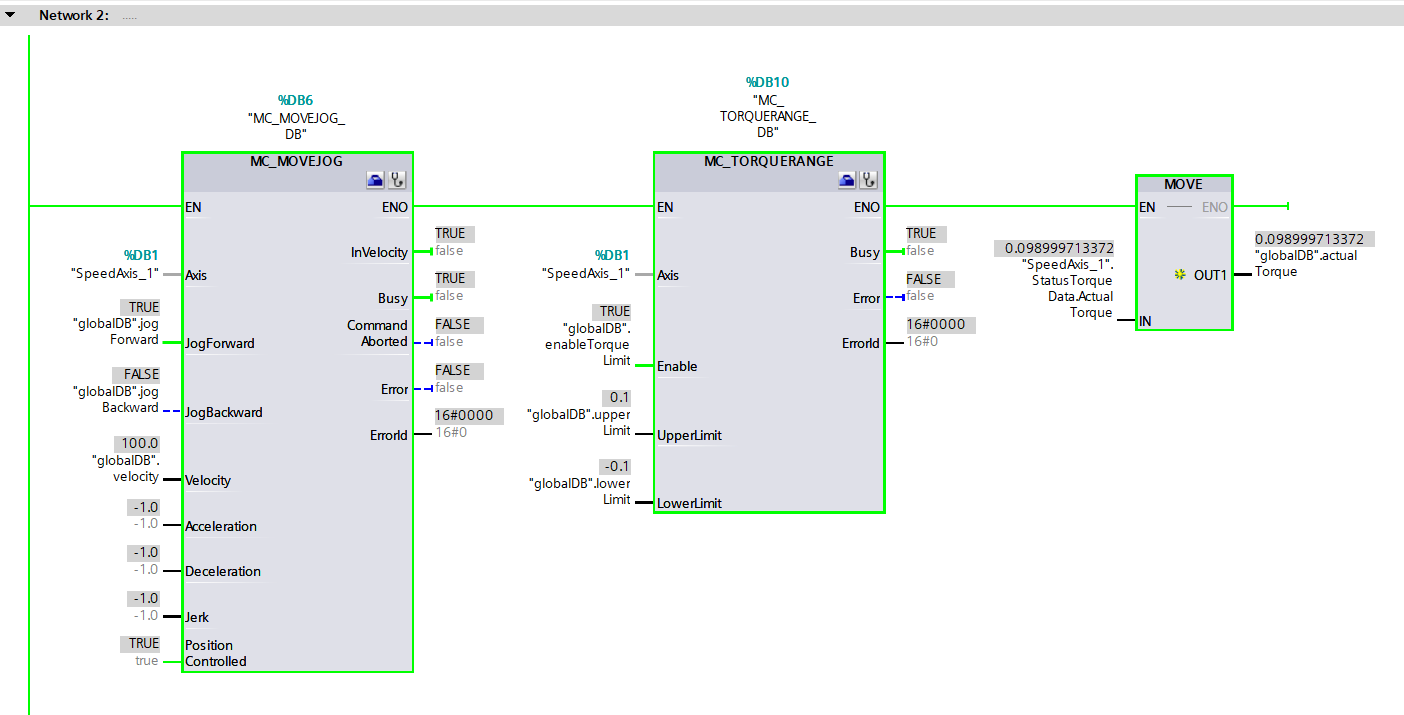
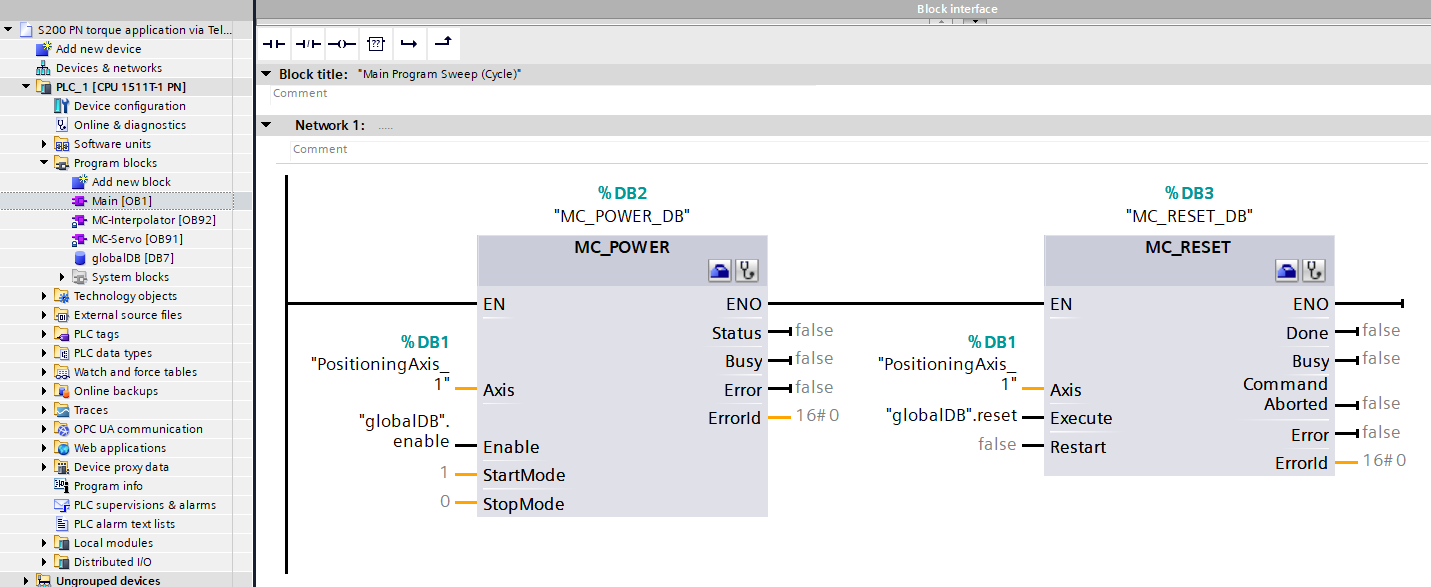
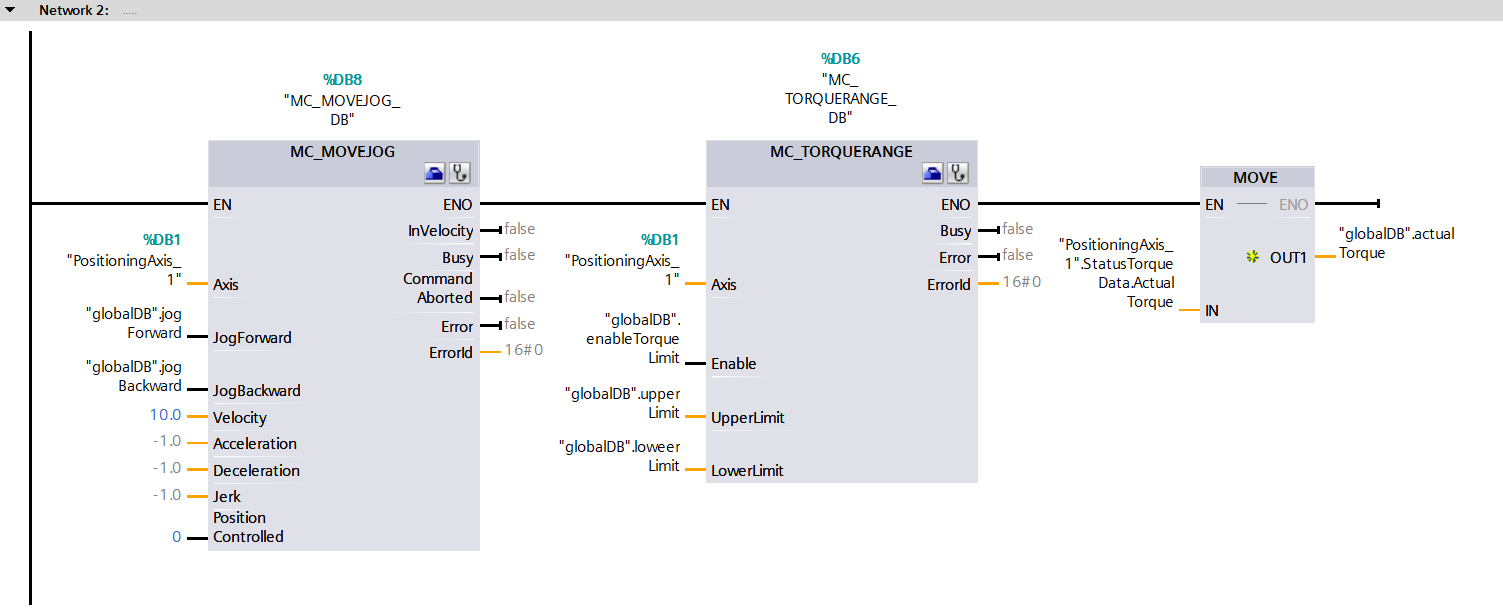
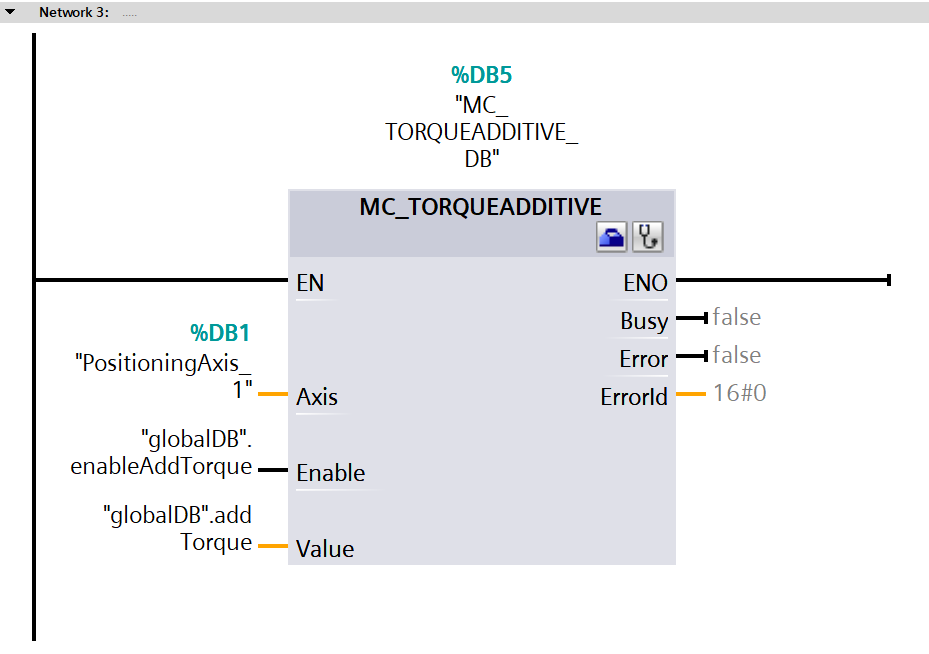
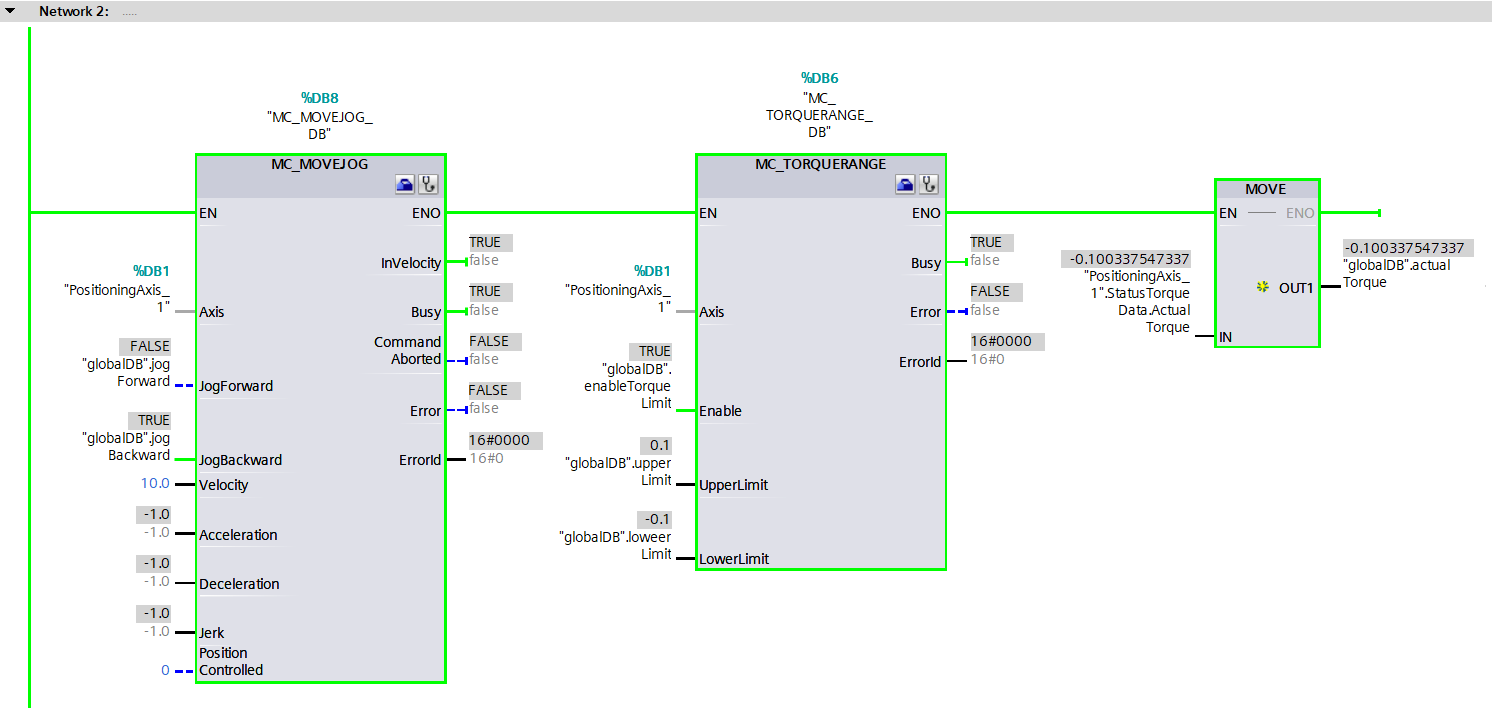
Open up the main organization block and create some logic in network 1, network 2, and network 3, as depicted in Figures 5.11, 5.12, and 5.13. Ensure that you compile the project and then initiate the download to the PLC.
Give the motor a spin and ensure the load torque is at 0.02Nm.
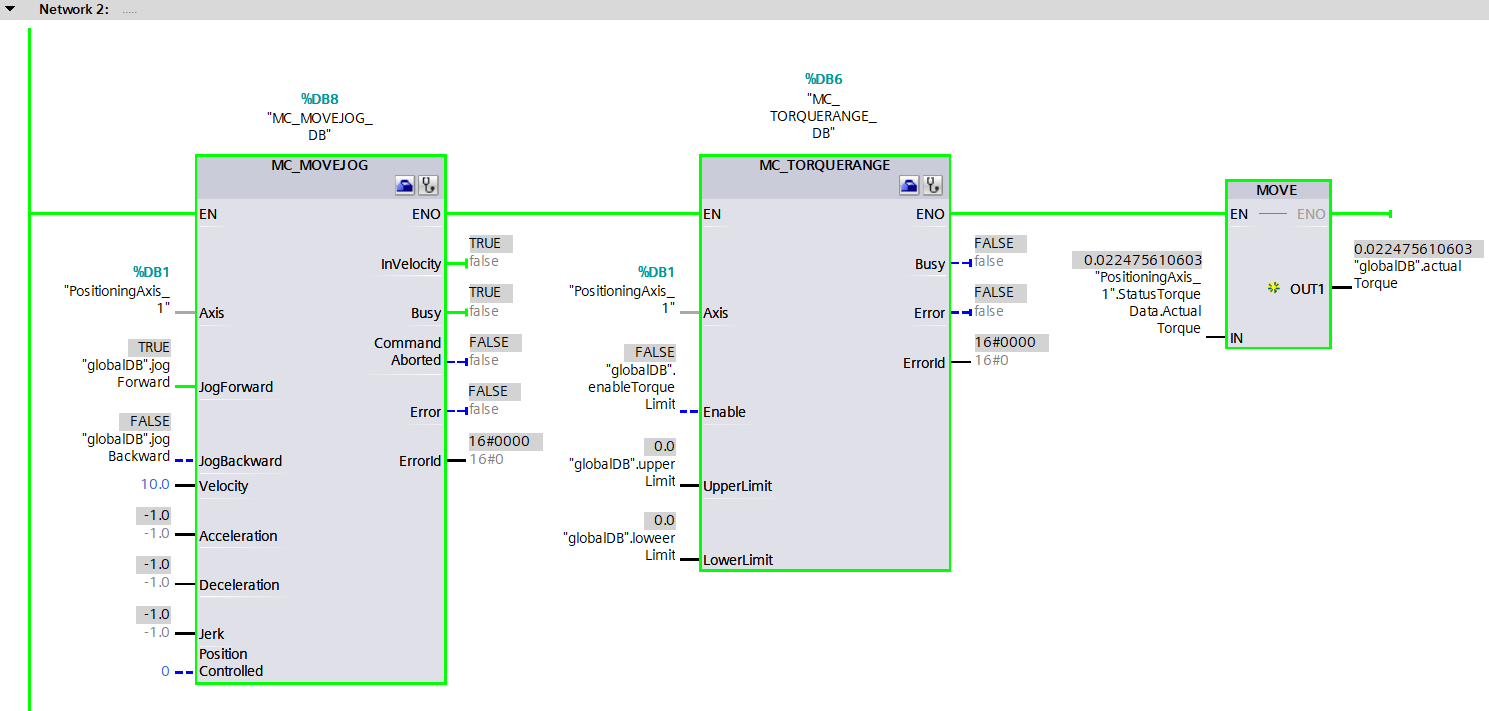
Bump up the torque limit above the load torque and activate the torque limit function. Bring the motor to a halt and verify that the actual speed registers as 0 while ensuring that the actual torque is restricted to the upper limit value.
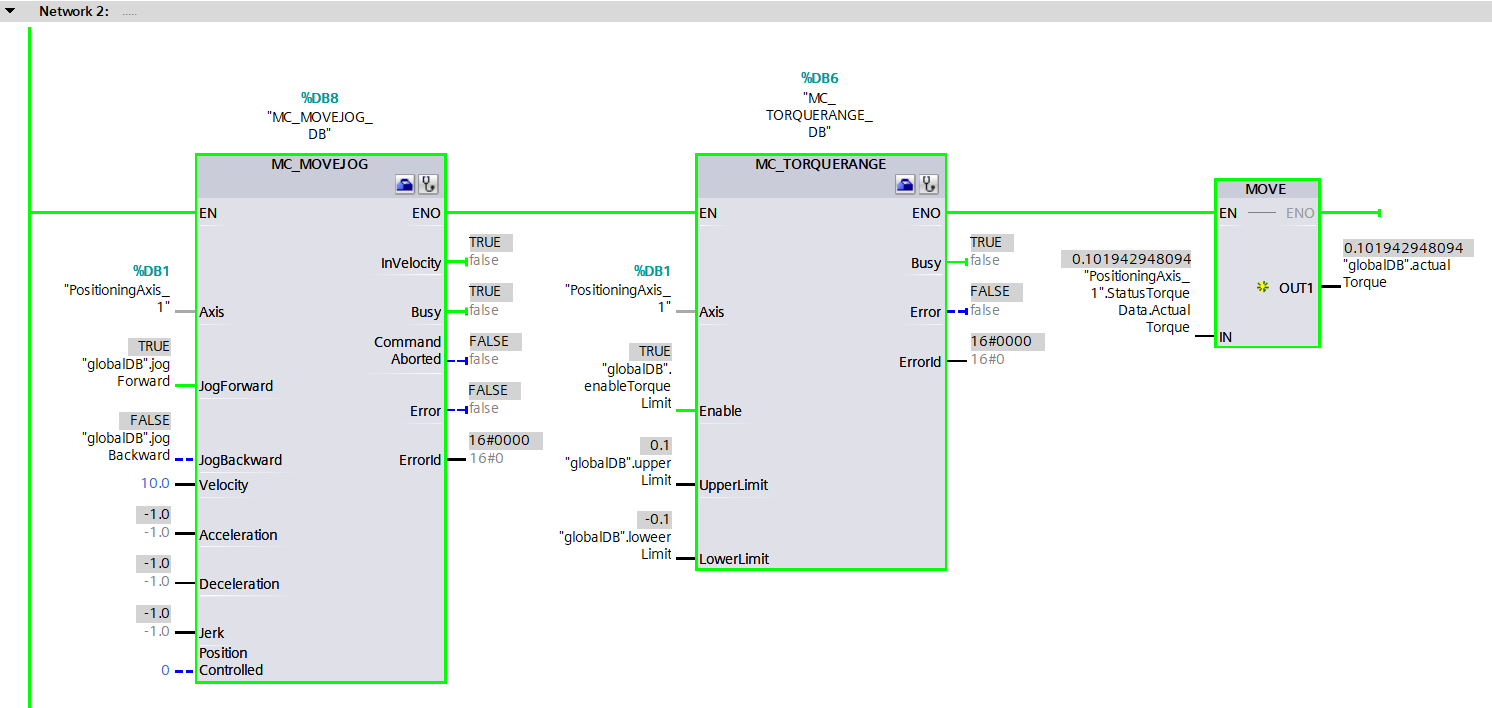
Switch the direction of rotation and once more halt the motor. Verify that the actual speed is at 0 and the actual torque is restricted to the lowermost value.
Conclusion
In conclusion, you learned about fundamental insights on Telegram 750, and you understood by integrating FB38052, you can cyclically take charge of the S200 servo drive. Finally, you figured out how to apply torque to the Siemens S200 servo drive using technology objects - speed and position - in real-time and isochronous real-time.
